



近些年来,空间电压矢量(Space Vector,SV)算法以其优越的性能和简便的算法在变频调速领域得到了极其广泛的应用,基于空间电压矢量控制的多电平逆变电路,特别是三电平逆变电路已进入实用化阶段,对其进行研究和分析很有实际意义。一般认为多电平逆变器是建立在三电平逆变器的基础上,按照类似的拓扑结构拓展而成的。电平数越多,所得到的阶梯波电平台阶越多,从而越接近正弦波,谐波成分越少。但这种理论上可达到任意N电平的多电平逆变器,在实际应用中由于受到硬件条件和控制复杂性的制约,通常在满足性能指标的前提下,并不追求过高的电平数,而以三电平最为实际。国外也有对七电平及更高电平的研究,但都还不成熟,特别受硬件条件和控制性能的限制,还处于理论研究阶段。
空间矢量控制是从电动机的角度出发,着眼于如何使电动机获得幅值恒定的圆形磁场,即正弦磁通。它以三相对称正弦电压供电时交流电动机的理想磁链圆为基准,用逆变器不同的开关模式所产生的实际磁链去逼近圆形磁链,由它们比较的结果决定逆变器的开关状态。由于这种控制算法把逆变器和电动机看成一个整体来处理,所得模型简单,便于微机实时控制,并具有转矩脉动小,噪音低,电压利用率高的优点。
三电平SVPWM逆变器与二电平SVPWM逆变器在SVPWM调制的原理上是一致的,但由于三电平电路本身电平数比两电平电路有所增加,三电平SVPWM算法中的空间电压矢量的数量也由原来的8个增加为27个,使得SVPWM算法的灵活性大大增强,但同时三电平SVPWM也存在着算法复杂和中点电压波动等问题。
6.3.3.1 三电平空间电压矢量的合成
两电平电路中常用的空间电压矢量的算法可以移植到三电平电路中。两电平电路中,每相桥臂均可以有两种工作状态,这样三相逆变桥共可合成23=8种状态,其中模大于0的有6种,其余两种电压矢量的模等于0,称其为零矢量。三电平电路中,每相桥臂均可以有三种工作状态,这样三相逆变桥共可以合成33=27种工作状态,其中存在一些重叠的电压矢量,实际的空间电压矢量共有19种,其中一个为零矢量。
下面推导PNN矢量的合成过程,其他矢量读者可以自行推导。
大家知道,三相电动机的三相绕组在空间布置上互差120°,由此可以画出三相电动机三组绕组的电压矢量的正方向的空间位置,如图6-14a所示。
当三相电动机采用三相三电平式逆变器供电时,逆变器每相的输出电压只可能有三种工作状态,当输出为正(P)时其输出电压的方向为正方向,幅值为Ud,当输出为零(O)时其输出电压的幅值为0,位于原点,当输出为负(N)时其输出电压的方向为正方向的反方向,幅值为Ud。
由此可以得到输出状态为PNN时的三相的三个空间电压矢量的示意图,如图6-14b所示。
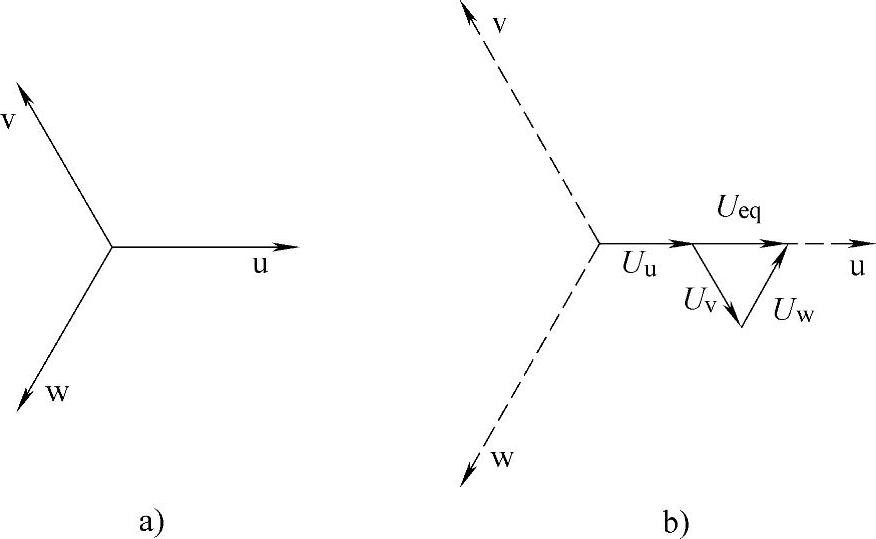
图6-14 空间电压矢量的合成
a)电动机三相绕组电压矢量空间位置 b)PNN
从图6-14b可以看出,对于不同的工作状态,电压合成空间矢量的大小有所不同,而且它们在坐标系中的空间位置也不同。若把逆变器的27种工作状态下的电压合成空间矢量都按上述方法一一画出,可得如图6-15所示的27个电压合成空间矢量的分布情况。把这些电压合成空间矢量的顶点相连,可形成一个外正六边形与一个内正六边形。外正六边形的顶点与原点相连有6个幅值最大的矢量,称为外电压矢量(大矢量),幅值都为2Ud。外正六边形每边的中点与原点间形成6个中电压矢量(中矢量),幅值都为3Ud。内正六边形各顶点与原点间形成12个矢量(其中两两重叠,实际的电压矢量有6种),其幅值都为Ud,是外电压矢量幅值的一半,所以可称为内电压矢量(小矢量),而且每个矢量都表示两种工作状态,如POO与ONN处于同一顶点(两矢量重合),但工作状态不同。三个零电压矢量PPP、NNN与OOO都落在原点上。总体来说,27种工作状态形成了4类电压合成空间矢量,即外电压矢量(幅值为2Ud)、中电压矢量(幅值为3Ud)、内电压矢量(幅值为Ud)与零电压矢量(幅值为零)。如不计重合矢量,独立的矢量只有19个,分别表示为U0~U18(从内到外按逆针方向旋转)。
6.3.3.2 三电平逆变器SVPWM的控制算法
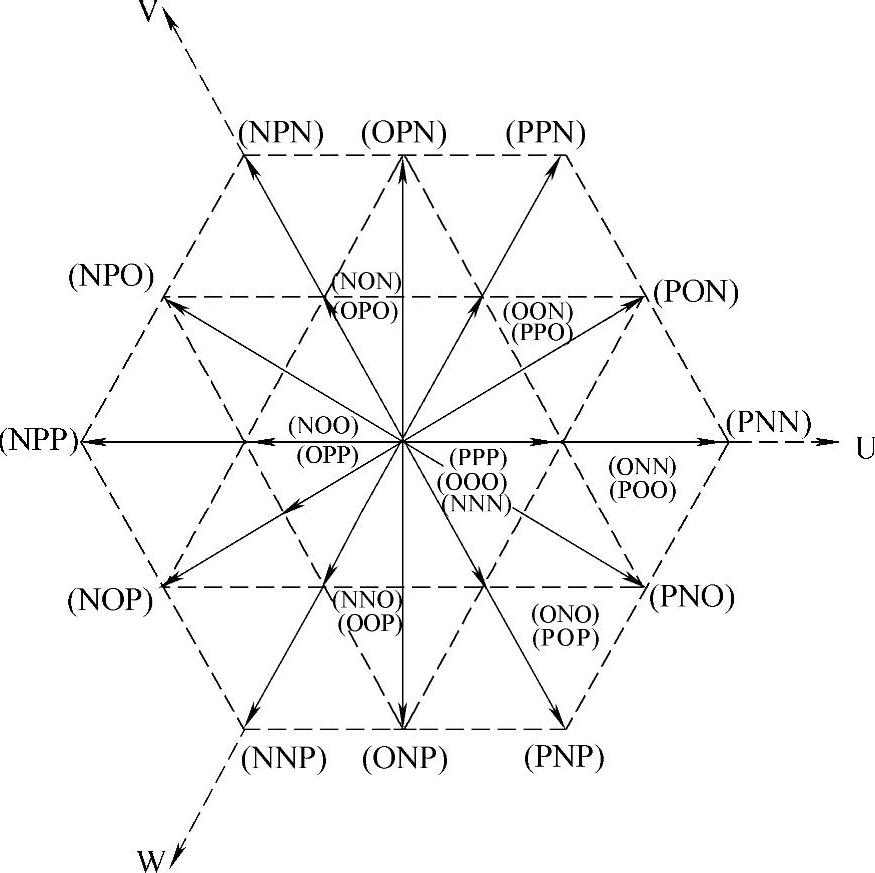
图6-15 电压合成空间矢量分布图
与两电平SVPWM相比,三电平电路的空间电压矢量增加为27个,这为控制算法的优选提供了很大的选择空间,为设计人员提供了很大的自由度,同时也增加了设计的复杂程度,当前这方面的研究成果很多,业界同仁们提出了许多种算法,在此对一些常见的算法作一些简单介绍。
所谓的控制算法,核心问题就是空间电压矢量的选择,也就是当等效矢量运行到哪个区间时采用哪几个空间电压矢量来合成的问题。仿照两电平SVPWM的做法,可以以六个大矢量PNN(U7)、PPN(U9)、NPN(U11)、NPP(U13)、NNP(U15)、PNP(U17)为边界,将整个六边形分为六个等边三角形(称为六个扇区)。这六个扇区除了其所包含的电压矢量不同外,其形状及组成等均具有一定的对称性,只需研究其中一个扇区,所得到的结论具有一定通用性,稍作改动就可推广到其他三角形中。
三电平逆变器的SVPWM算法主要包括参考矢量所在扇区号的判断及工作模式判断,开关矢量的选择优化,开关矢量作用时间计算,以及所选矢量作用顺序的确定。
为了减小谐波和开关次数,原则上,参考矢量在哪个扇区,就用哪个扇区的矢量来合成,当假定电动机U相正方向为坐标系X轴的正方向时,这几个矢量的数学表达式可以表示为
Ur=Uejθ=U(cosθ+jsinθ)
至于利用扇区内的哪几个矢量及各矢量的作用时间的计算,则各有各的算法,但总的来说,采用空间电压矢量算法来计算三电平逆变电路要遵循以下几个步骤:
(1)根据当前需要输出电压的幅值U以及初始相位角和当前运行的时刻,确定当前的参考电压矢量所在的位置,从而得到参考电压矢量Ur=Uejθ。
(2)确定Ur落在哪一个扇区,进而根据各自算法的不同确定其落在哪个小区间。
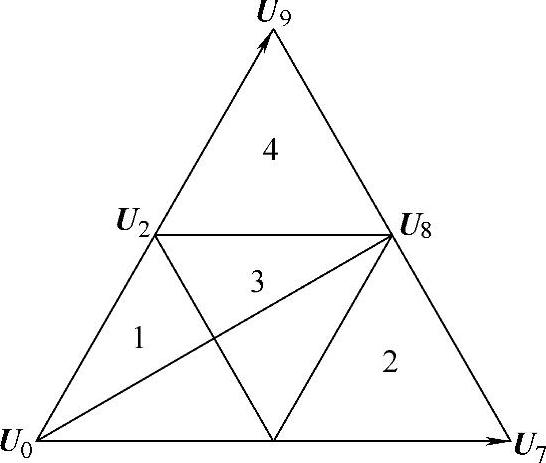
图6-16 传统算法I扇区区间划分示意图
(3)确定用哪几个空间电压矢量来合成Ur。
(4)根据Ur以及各空间电压矢量的表达式计算相应空间电压矢量的作用顺序以及各自的作用时间。
(5)考虑窄脉冲、开关次数等各种问题,最终确定各空间电压矢量所对应的开关组合以及相应组合的作用时间和次序。
在第I扇区中,如图6-16所示将U2、U8以及U1、U8的顶点连起来,则可以进一步将第I扇区分为四个小区间,如图6-16中的1、2、3、4所示。
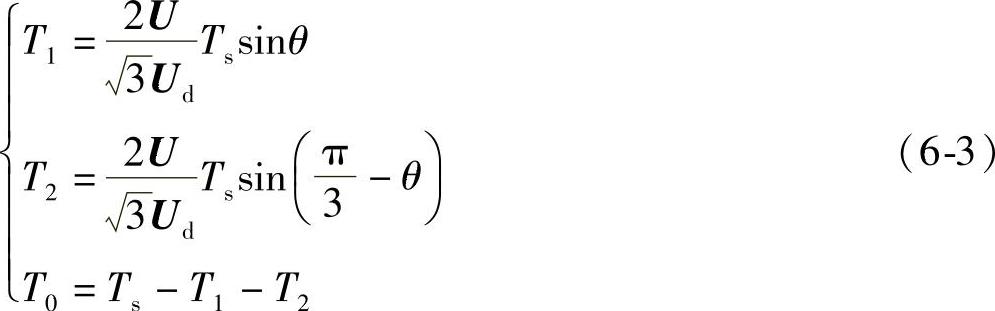
若参考电压矢量Ur=Uejθ包含在小区间1中,Ur就用U0、U1、U2的时间线性组合来近似等效,U0、U1、U2的作用时间可由下式来求解:
 (https://www.xing528.com)
(https://www.xing528.com)
式中,Ts=TN/2,TN为开关周期。
可以得到:

解得
当参考电压矢量Ur位于小区间2时,用U1、U7和U8来合成

当参考电压矢量Ur位于小区间3时,用U1、U2和U8来合成

当参考电压矢量Ur位于小区间4时,用U2、U8和U9来合成

再由式(6-4)或式(6-5)或式(6-6)将各个电压的作用时间计算出来,查得各空间电压矢量所对应的开关组合,用程序实现即可。
事实上,由于每种内六角形矢量都对应两种开关状态,零矢量对应三种开关状态,按照上述方法计算完成后,还要考虑用哪种开关组合。在选择空间电压矢量时,必须遵守以下两点:一是在矢量切换时,每相的开关工作状态只能从P-O、O-N(或反之),不允许P与N间的直接切换;二是尽量满足空间电压矢量切换时,被切换的开关器件只有一个,以降低开关损耗。至于组合电压空间矢量的形成方法,以及为形成这一组合矢量所采用的有关固有电压合成空间矢量及其工作时间,有多种计算方法,其原理此处不作赘述。
6.3.3.3 将三电平SVPWM分解为两电平SVPWM的简化算法
三电平SVPWM的空间电压数量多,计算复杂,选择判断也多,程序实现起来也很麻烦,参考文献[9]将图6-15所示的三电平空间电压矢量图分解为图6-17所示的六个小的六边形,每一个六边形就是一个直流母线电压为Ud的两电平空间电压矢量图的一部分,分别以每个小六边形的中点作为两电平的空间电压矢量图的原点,就可以用两电平SVPWM的算法来处理三电平SVPWM的问题,使计算得到简化。
以图6-17所示的小六边形1为例,如图6-18所示,设在三电平下的参考空间电压矢量为V∗,当它落在小区间1时,将其减去一个偏移矢量U,就得到了新的空间电压矢量U∗=V∗-U=V∗-Ud,再通过两电平的空间电压矢量计算方法就可以得到U0、U1、U2的作用时间T2、T1、T8,事实上它们就是原有的三电平空间电压矢量U2、U1、U8的作用时间。通过这种算法,只需确定参考电压矢量落在哪个区间,再减去相应区间的偏移矢量,就可以将三电平空间电压矢量作用时间的计算转化为相应的两电平空间电压矢量的计算,使计算得到简化。
6.3.3.4 三电平SVPWM控制中的一些问题
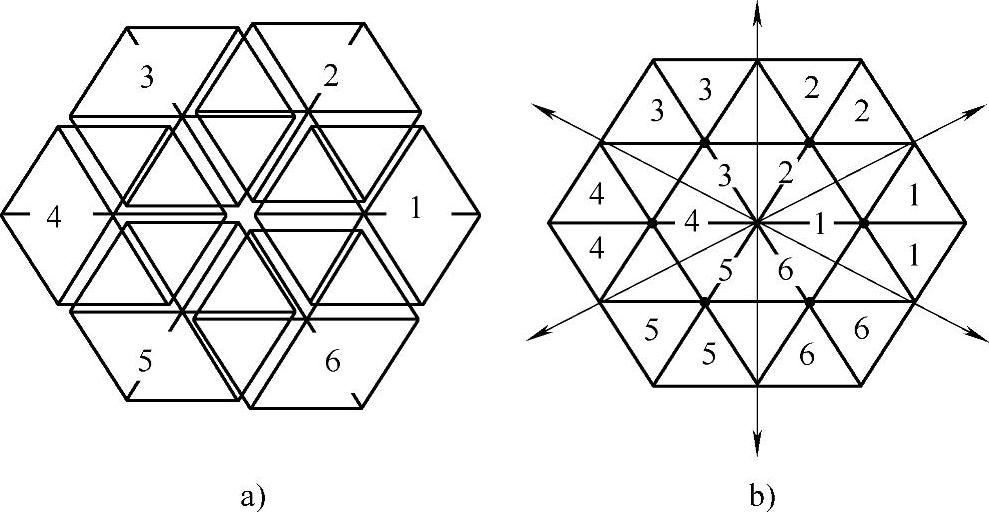
图6-17 简化的三电平空间电压矢量示意图
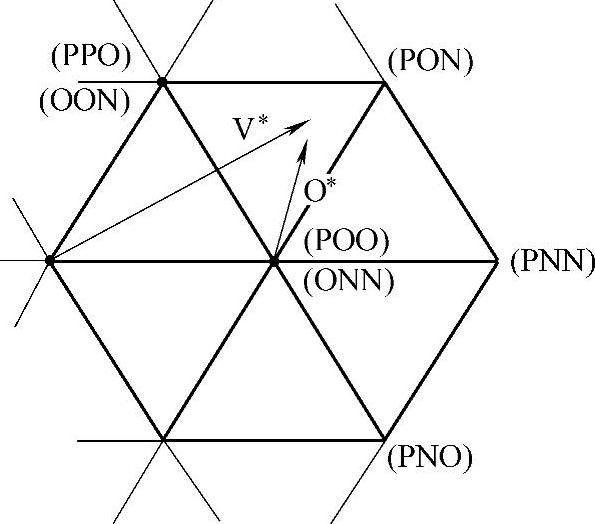
图6-18 三电平空间矢量转换为两电平空间电压矢量
在三电平SVPWM控制算法设计中,还有几个方面的问题需要加以特别关注,如谐波问题、减小开关次数的问题、中点电压平衡问题、窄脉冲问题等,其中最关键的是中点电压平衡问题和窄脉冲问题。
控制中点电压平衡的方法主要有以下四种:
(1)开环控制,通过交替选择正负小矢量,不需要检测直流母线电压和输出端电流,实现简单。但是由于无法补偿中矢量对中点电压的影响,所以只能通过中矢量自身的对称性,在一个完整的输出电压周期内,完成中点电压平衡,但这种平衡是一种稳态下的平衡,所以中点电压存在很大的低频纹波,需要选用较大的滤波电容,成本高、体积大。
(2)实时检测直流侧电容电压大小,如果出现不平衡,则根据中点电压的偏离方向,合理调整相应的小矢量PWM脉冲的作用时间,进行中点电压补偿。
(3)检测直流侧电容电压大小和直流侧中点电流方向,然后根据中点电压的偏离方向,合理调整相应的小矢量PWM脉冲的作用时间,进行中点电压补偿。这种方法由于增加了中点电流方向检测,因此可以实现能量双向流动的中点电压调整,而且不受功率因数的影响。
(4)检测直流侧电容电压大小和三相交流输出电流。该方法通过实时检测三相交流输出电流方向得到方向函数,利用该函数选择一个PWM周期内不同电压矢量作用时间来控制中点电流方向,实现电压平衡。理论上这种方法更好,它能计算出补偿的具体时间,但是该方法要采样的数据比较多,计算量比较大,对软硬件的要求较高。
消除输出窄脉冲的方法主要有以下三种:
(1)简单处理法,对过窄的脉冲或削去,或加宽至最小脉冲宽度,此种方式可用于IGBT变频器。
(2)零序电压注入法,向三相调制波中注入一定的谐波或直流电压,来消除窄脉冲。
(3)重矢量切分法,将一个重矢量(零矢量和小矢量)切分为两种或三种工作状态的方法来避免窄脉冲的产生。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。