



直接转矩控制技术方案晚于矢量控制。转矩和磁链的控制采用双位式砰-砰控制器(Bang-Bang控制器),对PWM变频器直接用这两个控制信号产生SVPWM波形。从而避开了将定子电流分解成转矩和磁链分量的解耦控制,省去了旋转变换和电流控制。与矢量控制相比较,大大地简化了控制系统的结构。
与矢量控制相比较,直接转矩控制的方法简单。直接通过逆变器开关模式的切换去控制电磁转矩,转矩响应更快。其缺点是存在转矩脉动问题。而矢量控制却具有更好的低速稳定性,调速范围更宽。前者适于需要快速响应的系统,而后者适于宽调速范围的系统。
弄清直接转矩控制的原理,需要很大的篇幅。本小节的目的,是使变频器的使用者建立较为明确的简要概念。着重说明利用磁通和转矩的砰-砰控制器去直接控制电磁转矩的原理。
从电压矢量的概念我们看到,瞬时的改变电压空间矢量,电机的磁动势一定会立即响应。因为不计定子电阻压降时,定子磁链空间矢量是电压空间矢量的积分:
Ψs=∫dusdt=uktk+Ψs0=ΔΨsk+Ψs0
式中 Ψs0——初始矢量。
上式表明,Ψs的改变,是由于uk及其作用时间决定的。采用图2-64所示的空间矢量的“折角控制”,则可以得到电机端电压的PWM波形。这就是说,适当的反复切换空间矢量,使磁场进进退退,Ψs的轨迹会向“圆”靠拢。如图2-69所示,为使Ψs的轨迹趋于圆旋转磁势,可以使定子磁链的幅值Ψs与给定值Ψs∗之间的偏差处于允许偏差ΔΨs之内,满足

这个容差范围可以用图2-70所示的两点式调节器的特性来设定,因为滞环宽度是可以人为调节的。容差越小,电压空间矢量的切换越频繁,Ψs越趋于恒定,磁场轨迹越趋于圆形。检测电机的电压、电流,再通过电机的磁链模型,可以求得磁链的实际值Ψs,与Ψs∗相比较,即可以实现闭环控制。
如果控制Ψs恒定,进而可以控制电机的电磁转矩。由电机理论,电机的电磁转矩可以表示为
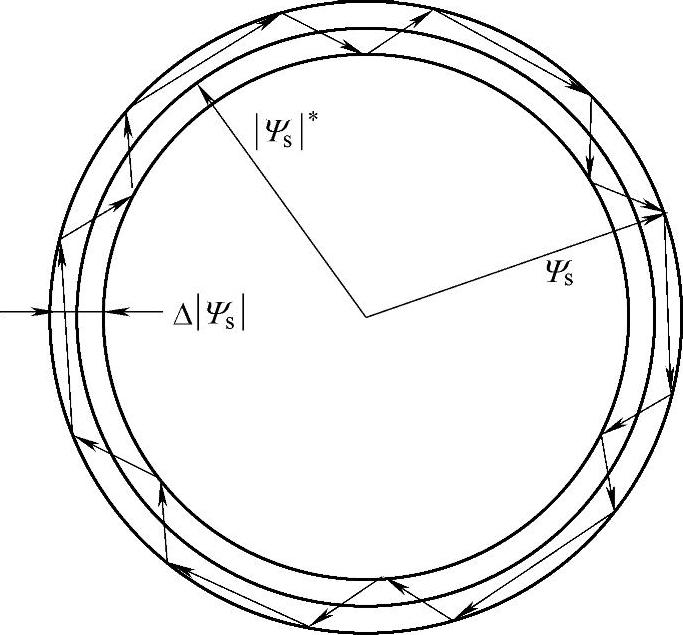
图2-69 Ψs允许误差
Tem=kΨsΨrsinθsr
式中 Ψs——定子全磁链矢量的幅值;
Ψr——转子全磁链矢量的幅值;
θsr——两磁链的夹角,称为转矩角。
利用上式,可以分析电压空间矢量对电机电磁转矩的“直接”控制功能。在足够短的采样周期内,可以忽略Ψr的变化,因为Ψr对电压空间矢量的反应要比Ψs的反应缓慢。只看电压空间矢量对Ψs的作用,即可判断转矩Tem的变化趋势。
恰当地选择电压空间矢量及其作用时间作用顺序。是直接转矩控制的关键,下面举例说明空间电压矢量的选择。
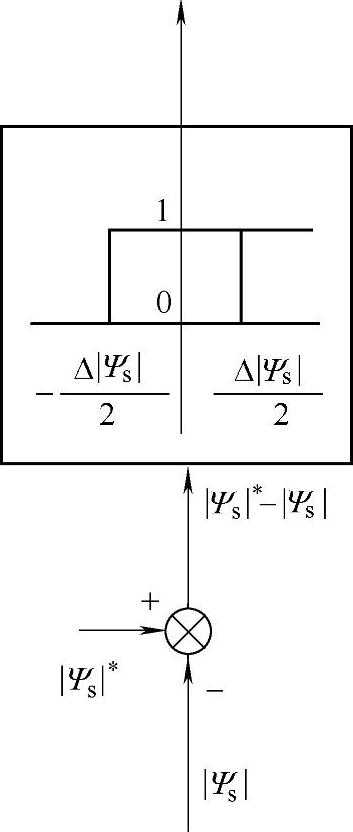
图2-70 两点式比较器
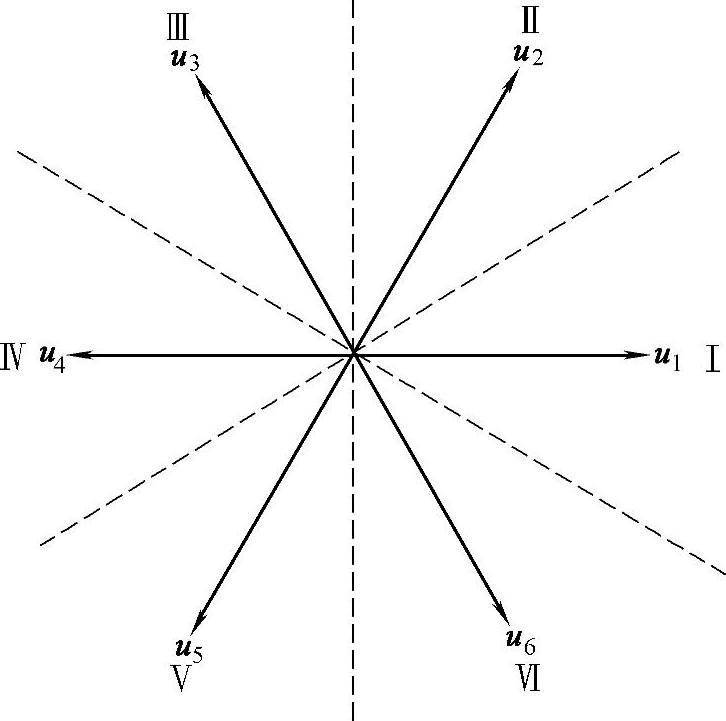
图2-71 扇区的定义
即时的选定电压空间矢量,与定、转子全磁链Ψs、Ψr的瞬时空间位置关系极大。为确定Ψs、Ψr的空间位置,必须定义电压空间矢量图中的扇区。为了实现直接转矩控制,按图2-71定义扇区,会对分析问题带来很大的方便(分析问题时,也可以用别的方式去定义)。显然uk(k=1~6)处于对应扇区k(k=Ⅰ~Ⅳ)的正中央,是这种定义方式的特点。
在电机定子的α-β静止坐标系的复平面内,初始状态下的Ψs和Ψr如图2-72所示,Ψs处于Ⅱ扇区内。θsr为转矩角如图所示。以Ψs、Ψr逆时针旋转为例分析问题。为了研究电压空间矢量如何选择,把电压空间矢量画在Ψs的矢头上。如前所述,Ψr对定子电压空间矢量的响应比Ψs响应缓慢,在很小的采样周期内,认为Ψr不变,无论是幅值和空间位置都不变。当改变电压空间矢量时,Ψs立即响应,我们仅根据Ψs的变化,来研究电磁转矩的变化,这么做是不会影响物理本质的。
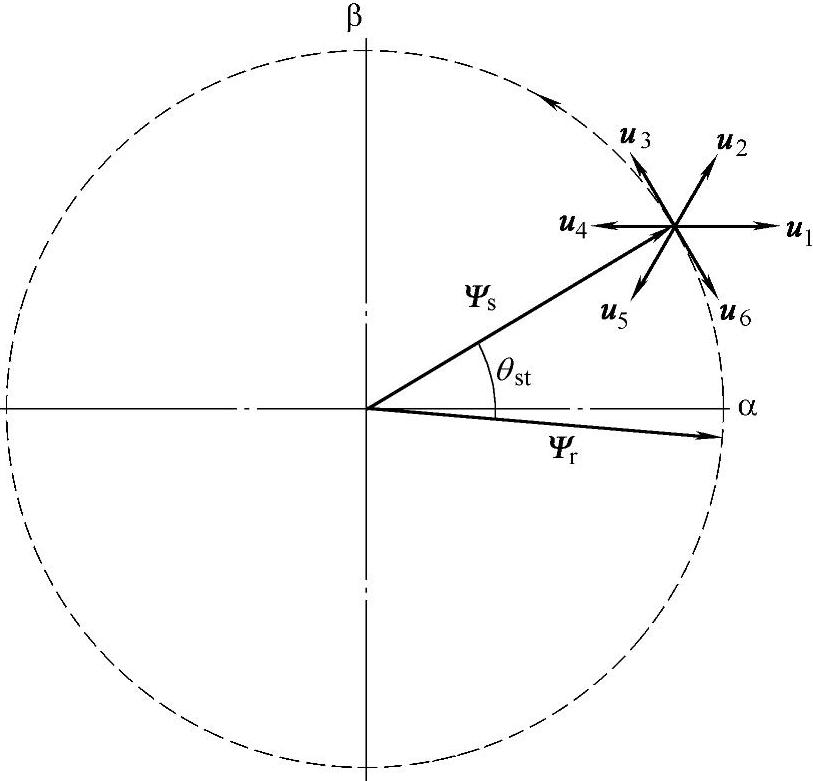
图2-72 定子磁通和所产生的转矩受逆变器状态选择的控制原理的说明
 (https://www.xing528.com)
(https://www.xing528.com)
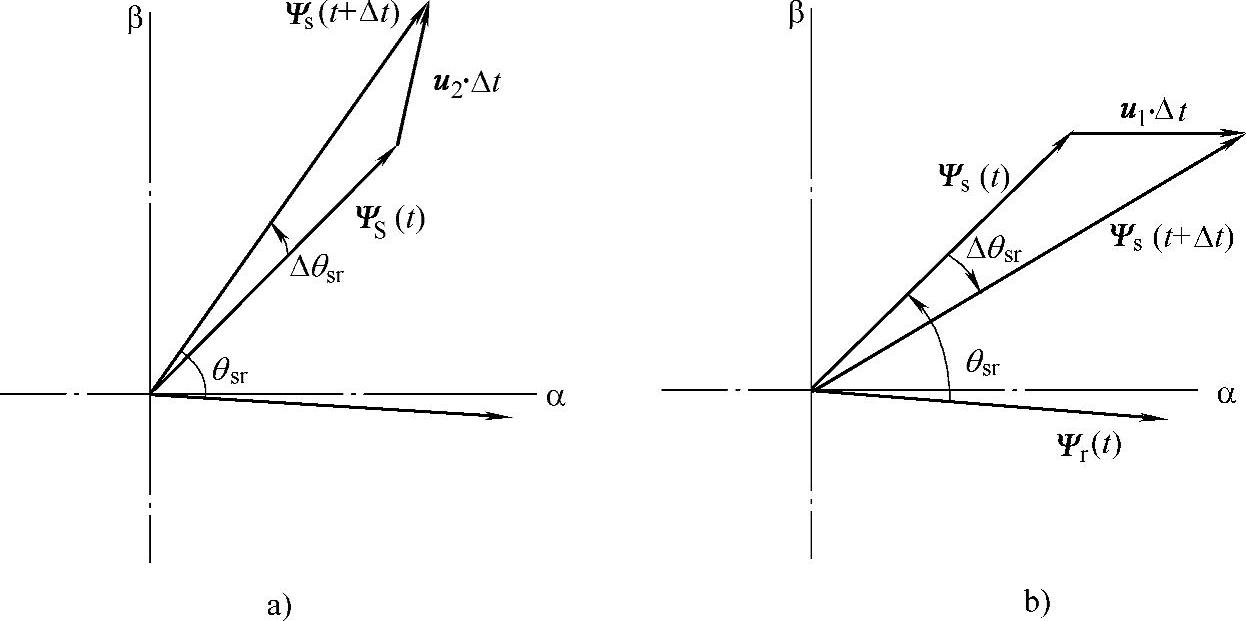
图2-73 电动机定子电压对于定子磁通与转矩影响的说明
在第Ⅱ扇区,如果选择u2矢量作用Δt时间,由图2-73a可见,Ψs增加,转矩角θsr增加,转矩Tem增加;如果选择u1矢量作用Δt时间,由图2-73b可见:Ψs增加,功角θsr减小,转矩Tem减小。
此外,如果选择零矢量,由于Ψs停顿,θsr减小,Tem减小。
根据上述分析,对于所有扇区的各种不同情况示于表2-6中。
表2 - 6 各个电压矢量对定子磁通和所产生转矩的影响

在图2-72中,Ψs转到第k个扇区时,它与uk矢量最靠拢,我们称Ψs与uk相关。Ψs转到②扇区时与u2相关,当Ψs的相位是200°时,则Ψs与u4相关。在特定的扇区内,选择Ψs的相关电压矢量时,实际上对转矩的影响是不定的。因为在扇区内Ψs是转动的,Ψs与相关矢量的夹角是有一个范围的。比如在第②扇区,Ψs可能落后于、同相于或超前于u2矢量。u2矢量对Tem的影响,可能是Tem增加、不变或减小。在图2-73中,对应的仅是其中一种可能。因此在表2-6中uk对转矩的影响用“?”表示。
我们不难得到如下重要概念
(1)定子磁链是定子电压的积分,它的大小强烈取决于定子电压。
(2)产生的电磁转矩与定子磁链和转子磁链之间夹角的正弦成正比。
(3)转子磁链对电压矢量变化的反应,要比定子磁链缓慢。因而定子磁链和电磁转矩可以直接由定子电压空间矢量的恰当选择(即逆变器的开关状态的选择)来直接控制。
定子电压矢量的选择,可由下列概念来决定。
(1)与Ψs矢量不对齐且夹角不超过±90°的非零电压矢量引起磁势幅值增加。
(2)与Ψs矢量不对齐且夹角超过±90°的非零电压矢量引起磁势幅值减小。
(3)与Ψs矢量不对齐且夹角等于±90°的非零电压矢量引起磁势幅值基本不变。
(4)零矢量u0和u7(合理的短持续时间)实际上不影响定子磁动势,它停止转动。
(5)依Ψs的转向为参考,超前于Ψs的非零电压矢量,使Tem增加。
(6)依Ψs的转向为参考,落后于Ψs的非零电压矢量,使Tem减小。
根据上述概念,可以事先设计矢量选择表,用于直接转矩控制系统。该选择表不难拟定[13],不再深入说明。
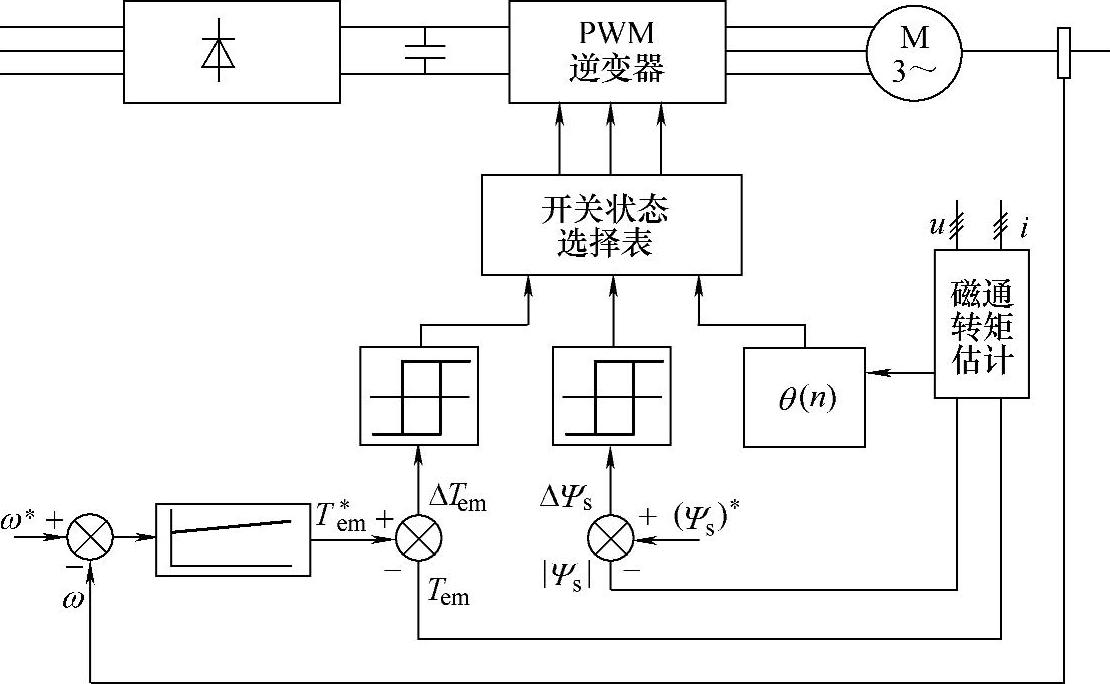
图2-74 直接转矩控制系统框图
直接转矩控制系统如图2-74所示。可见利用磁链的双位式Bang-Bang控制器和转矩的双位式Bang-Bang控制器的输出信号和检测得到的扇区角信号θk。可以根据开关状态选择表选择逆变器的开关状态,即选择电压空间矢量。进而直接控制电机的电磁转矩。实践表明转矩的动态响应是很快的。适用于要求快速响应的大惯量电机调速系统。
由图2-74可见,基于SVPWM的思维方式,利用定子电压空间矢量,直接对转矩进行控制,其控制系统比转子磁链定向的矢量控制系统简单得多。动态性能也比较好。但必须指出,这种控制的转矩脉动问题必须予以足够的关注。
图2-74中的“磁通、转矩估计”功能框的算法并不复杂,这里并不介绍,请参阅有关文献。
在这一小节只是从概念上介绍了利用电压空间矢量可以“直接”控制异步机的电磁转矩及空间电压矢量的选择方法。具体的直接转矩控制系统中,涉及的问题是多方面的,电机的模型,坐标变换等请阅读相关文献。
直接转矩控制通用变频器的具体性能,见第5章。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。