



上述的普通功能型U/f控制通用变频器的缺点,都是由于变频器没有转矩控制功能引起的。为了提高静态稳定性、加大调速范围、改善起动性能,并避免不必要的过电流跳闸,人们采取一系列的措施,其着眼点都在于实现转矩控制功能。
所谓高功能型通用变频器,是指具有转矩控制功能的(不用速度传感器)U/f控制式通用变频器。日本富士公司的FRENIC5000G7/P7、G9/P9,三垦公司的SAMCO-L系列均属于此类。采用32位DSP或双16位CPU进行控制,由于运算速度的大幅度提高,为实现转矩控制功能提供了必要的条件。
在此不准备说明某一具体机种的具体控制方案,仅举一例说明这种高功能通用变频器的主要控制思想及所达到的性能。这个例子是转子磁链恒定的控制方式,采用了磁通补偿器、转差补偿器和电流限制控制器,用以实现转矩控制功能。虽为一例,但足以说明这类变频器的控制思想。
采用这种控制方式,可使极低速度下的转矩过载能力达到或超过150%;频率设定范围达到1∶30;电动机的静态机械特性的硬度高于在工频电网上运行的自然机械特性的硬度,具有挖土机特性和“无跳闸”能力。
日本的资料称这种变频器为“无跳闸变频器”,“无跳闸”成了这种高功能通用变频器的代名词。在动态性能要求不高的情况下,这种通用变频器甚至可以替代某些闭环控制,实现闭环控制的开环化。其静态精度、限流功能在软件功能的支持下都显得十分优越。
2.8.2.1 转矩控制功能
具有转矩控制功能的高功能型通用变频器,即所谓无跳闸变频器的原理框图如图2-47所示。控制电路中包括实现转矩控制和对逆变器进行PWM控制的两部分。对于后一部分不作具体说明,并认为它可以保证输出波形正弦,且具有足够的响应速度。
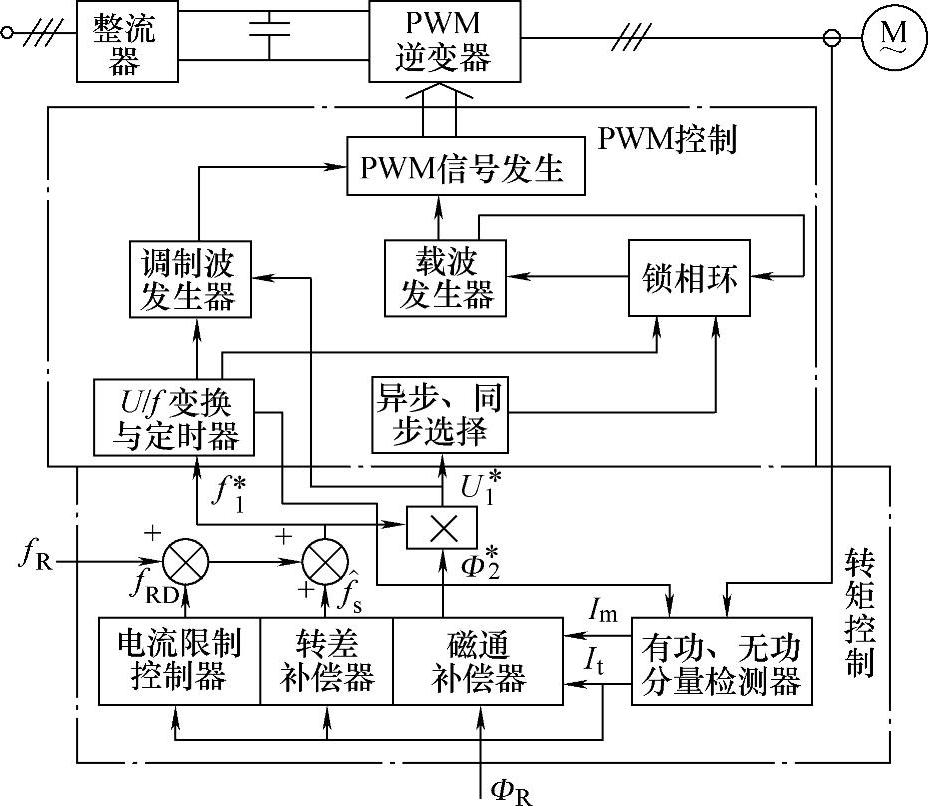
图2-47 无跳闸控制的原理框图
这种控制方式除需要定子电流传感器外,不再要任何传感器,通用性强,适于各种型号的通用异步电动机。
转矩控制部分包括有功、无功电流检测器,磁通补偿器;转差补偿器和电流限制控制器。后三者的作用是根据定子电流的有功分量It和无功分量Im去计算变频器的频率参考值和电压参考值,即图中的f1∗和U1∗。以保证转子磁场的恒定,并在负载出现冲击的情况下,适当地补偿Φ2∗,以防止过电流跳闸。
1.转矩控制功能 通用变频器驱动不同类型的异步电动机时,根据电动机的特性对压频比的值进行恰当的调整是十分困难的。一旦电压不足,电动机则不能产生与负载相适应的电磁转矩。出现过载则可能出现跳闸。因此,无论多大的负载转矩都必须使电动机产生的转矩随负载转矩变化。电动机的电磁转矩为

式中 Φ2——异步电动机转子全磁通;
ω2——转差角频率;
np——磁极对数;
r2——转子电阻。如果转子磁通恒定而不随负载变化,电磁转矩T与转差角频率ω2(即负载转矩)成正比。转矩控制部分利用磁通补偿器和转差补偿器来调整f1∗和U1∗,以保证转子磁通恒定。如果电动机的转矩增大到最大允许值以上时,电动机将失速,变频器也会跳闸。因此图2-47中设置了抑制过电流的电流限制控制器,它可以保证转矩或电流不超出允许值,实现挖土机特性。
2.定子有功、无功电流的检测 为方便,将异步电动机的等效电路化成图2-48的形式。其中 是转子电流的有功分量,即转矩分量,
是转子电流的有功分量,即转矩分量, 为磁场电流分量。相应的电路参数如图中所列。
为磁场电流分量。相应的电路参数如图中所列。
根据上述等效电路,转差角频率ω2和转子磁通Φ2可如下计算:

式中 ks=r2/(Lm+l2)Im′;
L′m=L2m/(Lm+l2);
T2——是转子时间常数,T2=(Lm+l2)/r2;
p——拉普拉斯算子。
如果有功电流I′2和磁场电流I′m。可以检测的话,则ω2和Φ2可由上述两式求出。
I′2和I′m的检测方法,通常是用定子三相电流瞬时值和转子磁通的空间相位角来计算。而该相位角的检测必须采用传感线圈或传感变压器等来实现,显然不适于通用变频器。
这里采用了一种替代的方法,根据定子电压的相位把定子电流分解成与定子电压平行且与转子有功电流I′2成比例的It和与定子电压垂直且与转子电流的无功分量I′m成比例的Im,如图2-48b所示。由于定子电压的相位可由PWM控制电路中的调制波形的角度来获知,仅定子侧电流需要检测,这完全适合于通用变频器。
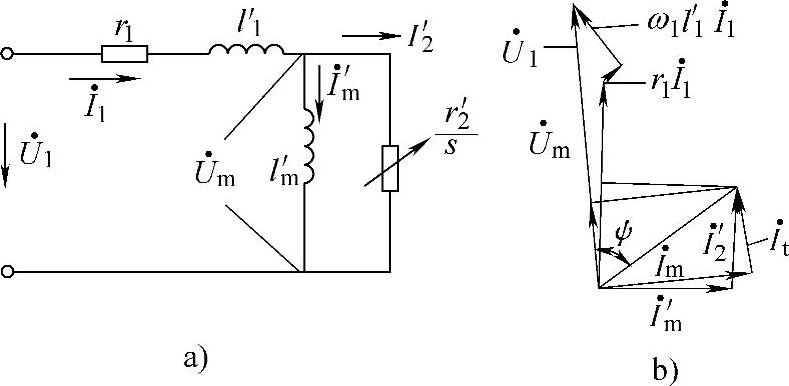
图2-48 经过变换的异步机的等效电路和矢量图
a)等效电路 b)矢量图
s1—转差率 r1—定子电阻 l1—定子漏感
Lm—励磁电感 r1—转子电阻 l2—转子漏感
L1=Lm+l1L2=Lm+l2r′2=(Lm/l2)2r2l′1=l1+(Lm/l2)l2L′m=L2m/L2
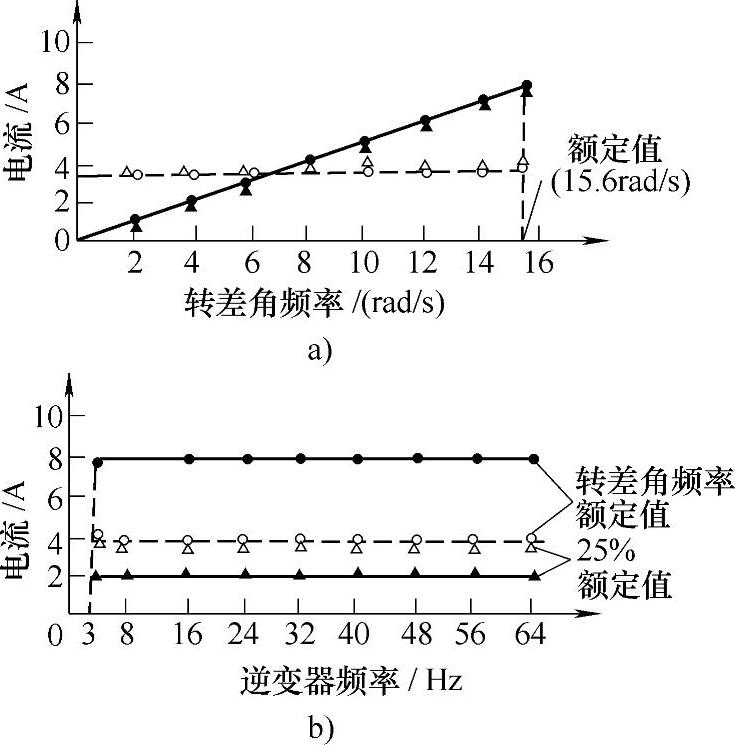
图2-49 有功电流、无功电流检测器的特性
a)与转差角频率的关系 b)与变频器运行频率的关系
值得注意的是,这种将定子电流分成Im和It的方法,绝不是单纯地检测定子功率因数角ψ,因为即使定子电流一定,定子角频率改变时,定子侧漏抗ω1l′1和电阻r1的比例关系也会改变,即ψ角是随ω1变化的。这就导致负载转矩不变时,It和Im也会随变频器的运行频率而变化。为避免这一问题,采用了一种特殊而较为简易的算法[6],图2-49示出了实验结果。图2-49a说明定子电流有功分量的变化与由负载决定的转差角频率成正比;图2-49b说明在ω2=C的条件下,尽管定子频率f1由3Hz变化到60Hz,定子电流的有功分量也能保持恒定,不受f1的影响。通过较详细的计算还表明It、Im和I′2、I′m是成比例的。
在It和Im的算法中,要求将电动机的容量、极数等有关数据输入到变频器的存储器中。
实现了定子电流的转矩分量和磁场分量的分解,It和Im可以作为负载转矩和转子磁通的实在值的检测信号来使用,这就便于控制式(2-14)和式(2-15)中的ω2和Φ2。如果保持Φ2=C,控制ω2,则可控制电磁转矩。
3.磁通控制 图2-47中,进入磁通补偿器的信号ΦR为转子磁通的设定值;Im作为转子磁通实在值的反馈信号;It反映负载转矩并作为磁通补偿控制的控制信号使用。
控制电路中转子磁通的参考值Φ2∗由如下关系式决定:
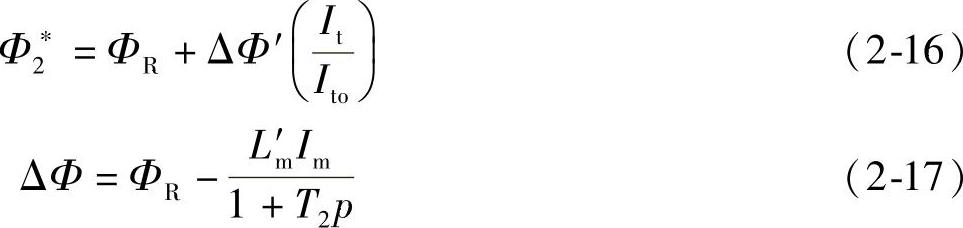
式中 ΔΦ′——补偿ΔΦ的PI调节器的输出值;
Ito——定子电流有功分量的最大值;(https://www.xing528.com)
ΦR——转子磁通的外部设定值。
磁通补偿器的结构如图2-50所示。
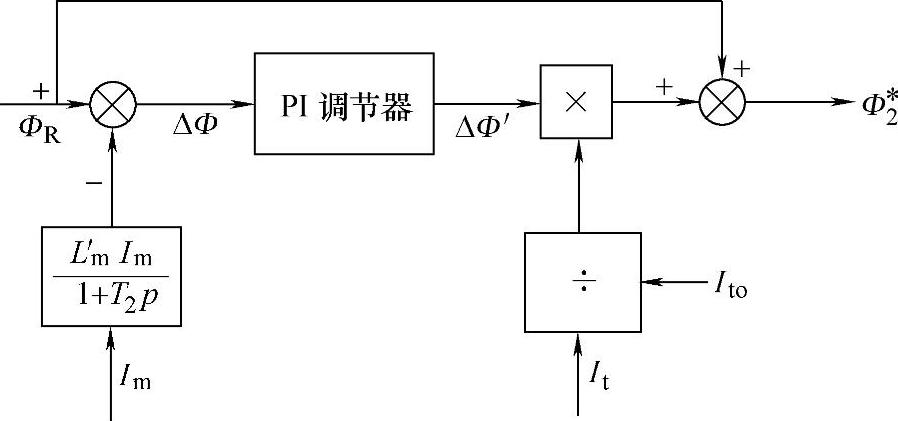
图2-50 磁通补偿器的结构
磁通补偿的目的是,用补偿转子磁通的参考值Φ2∗的方法去抑制由于负载冲击所引起的转子有功电流的突变,以使励磁电流不致于减小。当负载转矩在小于转子时间常数的较短时间内变化时,式(2-16)中的第二项随负载转矩的变化而变化,尽管ΔΦ′变化较慢。
图2-51说明磁通补偿抑制跳闸的原理。没有磁通补偿,转矩增加,定子电流迅速增加到图中负载转矩TL2上的C点所示的值。这是由于负载增加励磁电流随之减小所造成的。由式(2-16)可知,尽管负载转矩突然增加,由于定子电流的有功分量It可以调节Φ2∗,所以可以防止励磁电流的减小,定子电流将由A点移到B点,跳闸受到了抑制。
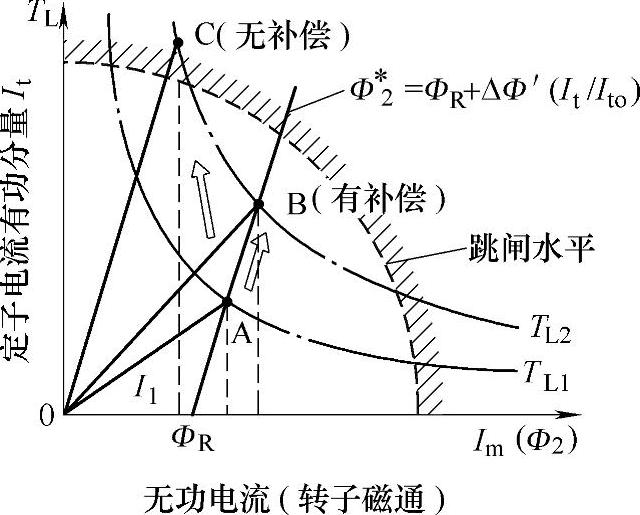
图2-51 当负载突然变化时磁通控制的原理
即使负载转矩不变,由于变频器运行频率的减小也可能使磁通减小,但这种减小可由式(2-17)的关系得到补偿,保持电动机的Φ2=C。
4.转差补偿 如果转子磁通由于磁通补偿的结果总保持为常数,则电磁转矩可以和转差频率成正比。因此,靠变频器的频率参考信号 可以与负载转矩成正比地去调整电动机的电磁转矩。
可以与负载转矩成正比地去调整电动机的电磁转矩。 的调整可由定子电流有功分量It(即负载转矩)所决定的转差频率的设定值
的调整可由定子电流有功分量It(即负载转矩)所决定的转差频率的设定值 来控制,且用如下两式计算:
来控制,且用如下两式计算:

式中  ;
;
fR——变频器频率的外部设定值。
如图2-47所示,当It<Ito时,转差频率的补偿按式(2-19)的关系进行,即负载增加, 随之自动增加,加大运行转差率提高电磁转矩。在恰当的补偿下,不用速度传感器,即可实现对转速较精确的控制。
随之自动增加,加大运行转差率提高电磁转矩。在恰当的补偿下,不用速度传感器,即可实现对转速较精确的控制。
5.电流限制控制 这种控制的目的是使电动机能发出某一最大转矩,并且不论负载有多么重,变频器也不会出现跳闸,即实现挖土机特性。当负载特别重,比如说It已经大于可允许的Ito,那么转差频率变得特别大,结果定子电流(∝ )将升到跳闸保护的水平,并且变频器发生跳闸。重载情况下,若采用电流限制控制器将十分有效,无论负载多么重,也不会跳闸。
)将升到跳闸保护的水平,并且变频器发生跳闸。重载情况下,若采用电流限制控制器将十分有效,无论负载多么重,也不会跳闸。
变频器中逆变器的输入功率Pin由下式给出:

式中 Kp=3/(Lm+l2)Im;
Ed——逆变器输入电压;
Id——逆变器输入电流;
ωr——电动机转子旋转角频率。
在式(2-20)中,实际是假定逆变器输入功率等于电动机的轴功率,忽略了逆变器和电动机的损耗;同时还假定同步角频率 和转子旋转角频率ωr相等,即认为逆变器运行频率远高于转差频率。由于问题的着眼点仅是抑制由于过载所造成的过电流跳闸,所以上述假定是允许的。
和转子旋转角频率ωr相等,即认为逆变器运行频率远高于转差频率。由于问题的着眼点仅是抑制由于过载所造成的过电流跳闸,所以上述假定是允许的。
如果在直流侧大电容的作用下Ed恒定,并且在式(2-16)和式(2-17)的基础上,电动机的Φ2也恒定,那么逆变器的输入电流Id将与It、 两者之积成正比。因此无论负载怎样重,当It增加到大于Ito时,随着It的增加协调地减小频率的设定值
两者之积成正比。因此无论负载怎样重,当It增加到大于Ito时,随着It的增加协调地减小频率的设定值 ,总可以使
,总可以使 限制在特定的水平以下,不致发生跳闸。
限制在特定的水平以下,不致发生跳闸。
假定Φ2恒定,当It>Ito时利用如下两式实现电流限制功能:

式中 T1=K1(dIt/dt)-1其中的K1是可由用户确定的可调增益,可根据所用电动机的特性适当改变。时间常数T1随It的变化率而改变,当负载冲击剧烈而dIt/dt较大时,T1将减小,以加快f1∗的跟踪速度,迅速地抑制逆变器输入电流Id的增长。
电流限制器可以控制It电流,使之保持在最大可能值上,尽管很重的负载加到电动机上,电动机可以发出最大转矩 ,并实现挖土机特性。
,并实现挖土机特性。
定子电流有功分量的最大值Ito,可根据电动机和变频器的容量人为地设定。变频器的主开关器件是半导体器件,承载能力是有限的,Ito的设定主要依据变频器的电流过载倍数。
很多资料中把这种挖土机特性称为“转矩限定功能”。
为保证上述转矩控制功能的实现,应恰当地调节定子电压和频率,参考值U1∗由下式确定:

即转矩控制功能的实现是通过控制 和
和 之间的关系来实现的,仍属于U/f控制方式。
之间的关系来实现的,仍属于U/f控制方式。
2.8.2.2 高功能通用变频器的性能
图2-52示出了这种转矩控制功能的实际实验结果。图2-52a给出了在转差频率补偿不起作用的条件下电流限制器的特性。没有电流限制器,变频器出现跳闸;有电流限制器,电动机在恒定的转矩下减速,实现挖土机特性。
图2-52b表示低速(30r/min,相当于1Hz)下的转矩特性,电机最大转矩大于150%。这是磁通补偿所收到的效果。
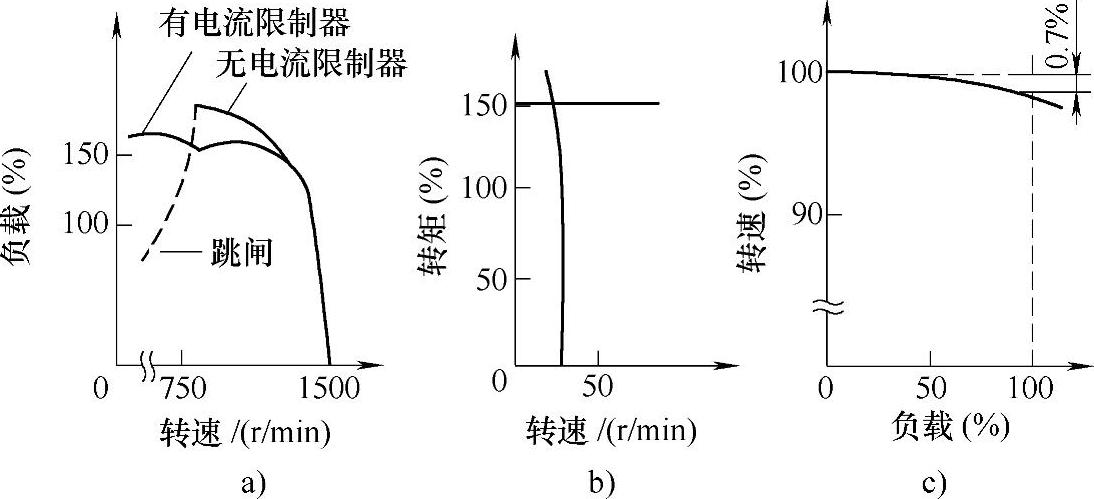
图2-52 转矩控制功能的作用
a)电流限制控制 b)磁通补偿控制 c)转差补偿控制
图2-52c给出了在1500r/min下,负载从0变化到100%时转速的变化情况,由于转差补偿的作用,速度变化被限制在0.7%以内。可见机械特性的硬度高于工频额定电压运行时的情况。
具有转矩控制功能的高功能型U/f控制通用变频器的特点是,电动机机械特性硬度高,低速过载能力大,可实现挖土机特性,即具有过电流抑制功能。通常,这类变频器需要在EPROM中存入电动机的参数,以便根据电动机的容量和极数去选择这些参数。
具有一定转矩控制功能的不同厂家生产的通用变频器的不同机型,其硬件构成和控制算法都有一定的差别。上面所谈的控制思想并不代表某一具体机型。是否属于这一类变频器,主要从其性能是否具有上面所述的特点来区分。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。