



图2-43示出了不计铁损耗时异步电动机的T型等效电路。
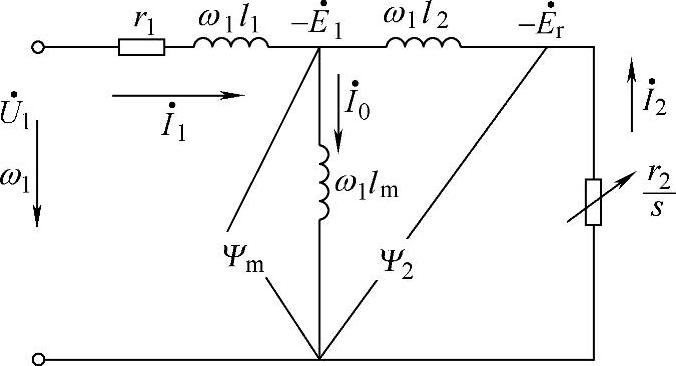
图2-43 异步电动机的T型等效电路
由等效电路可知
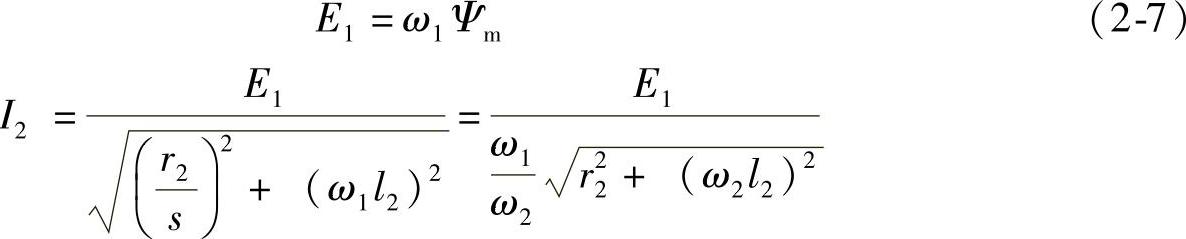
式中 E1——定子相电动势;
ω1——定子角频率;
I2——转子相电流;
s——转差率,s=ω2/ω1;
ω2——转差角频率;
r2——转子相电阻的折算值;
l2——转子相漏感的折算值。
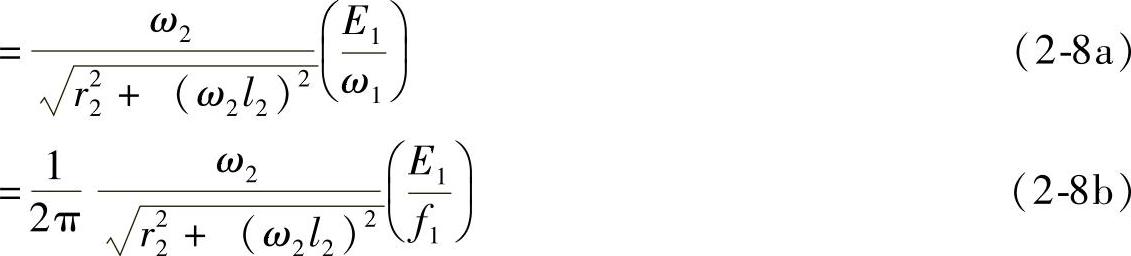
由于异步电动机的电磁转矩等于电磁功率Pm除以同步角速度Ω1
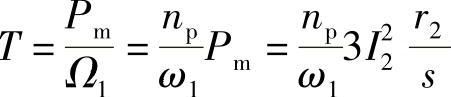
将I2代入上式
式中 np——极对数。
上述表达式是以转差角频率ω2为自变量的转矩特性,T是关于ω2的二次曲线。令dT/dω2=0求出产生临界转矩时的临界转差角频率ω2m:

ω2m代回到式(2-9)中,得临界转矩为
画出T=f(ω2)和I2=f(ω2)的关系曲线,如图2-44a所示。由图可见,在变频传动过载能力允许的范围(通常为1.5~2.0倍)内,T=f(ω2)和I2=f(ω2)基本上是直线。稳定运行时,ω2的大小代表着负载转矩TL的大小。(https://www.xing528.com)
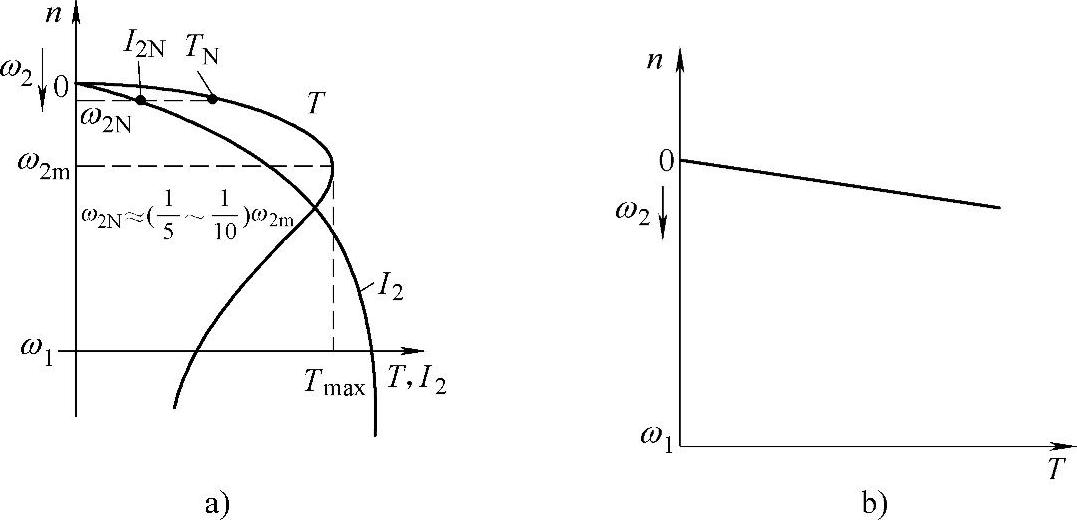
图2-44 异步电动机的转矩特性
a)以Ψm为参变量的转矩特性 b)以Ψ2为参变量的转矩特性
利用通用变频器对异步电动机变频调速时,和直流调速的概念一样,在基速以下通常是恒转矩调速方式,保持电动机的主磁通Φm〔相当于式(2-9)中的Ψm〕为额定值ΦmN不变,即Φm=ΦmN。而在基速以上,则是恒功率调速方式,实际上电动机处于弱磁状态,Φm<ΦmN。
对主磁通的控制,可以通过协调式(2-9)中E1和f1之间的关系来实现。下面就恒转矩调速和恒功率调速方式分别进行简要的说明。
1.恒转矩调速 变频调速中,若保持E1/f1=C的协调控制条件,可以满足Φm=C的要求,实现恒转矩调速方式。
变频过程中,如果主磁通保持恒定,由它去切割转子绕组,只要得到的转差角频率ω2=2πf2是相同的,笼型异步电动机的转子电阻、电抗参数,转子功率因数,转子电流和电磁转矩都将保持在原有值上,不会变化。因为站在转子上看,起作用的只是主磁通的幅值和它切割转子的相对速度(∝ω2=2πf2),并不涉及主磁通的绝对转速(∝ω1=2πf1)。如果负载转矩TL保持在额定值不变,即ω2=ω2N不变,不论定子频率f1设定在什么值上,电动机都可以运行在与额定工作点相类似的最佳状态,既可被充分利用,又不致于过热。恰好满足恒转矩调速方式的要求。
保持主磁通为常数,电动机的变频人为特性的形状将保持不变,不同定子频率下的机械特性平行,且临界转矩不变。
可以想到,保持E1/f1=C,则Φm=C,电动机不会出现欠励或过励所造成的不正常情况。另外,转子电流和电磁转矩都仅由ω2决定,从低速到高速的范围内,两者之间保持着确定的关系,电动机的功率因数和效率在调速中变化不大,都将基本保持在额定运行时的水平上。
如2.2节所述,E1是电动机的内部电动势,难于直接检测与控制。通常是通过调整U/f函数曲线的模式来近似地保持E1/f1=C的关系。
2.恒功率调速 实现恒功率调速方式,也要靠协调E1与f1之间的关系来保证。协调控制条件是E21/f1=C。
在式(2-9c)中,若保持E21/f1=C,则T∝1/f1,即Tf1=C,异步机的电磁功率是恒定的。因此,在E21/f1=C条件下,可以实现恒功率调速方式。
在式(2-9c)中,保持E21/f1=C,随着f1的提高,在同样的ω2下,T将成反比地减小。反过来说,就是在同样的T值下,ω2将增大。即随着f1的提高,转矩特性变软。另外,对于临界点而言,Tmax也随f1的提高而成反比地减小。
当定子频率高于电动机的额定频率时,受额定电压的限制,不允许电动机的电压再提高。通常在f1上升时,保持定子电压U1=U1N不变,这可以称为恒压运行方式。恒压运行方式属于近似的恒功率运行方式,说明如下。
由式(2-9c),把U1=C近似地看成是E1=C,则T∝1/f12。在ω2保持不变时,随着f1的上升,电磁转矩将按f1二次方的关系迅速减小,这是问题的一个方面。另一方面,由式(2-8),当E1=C时,I2∝1/f1。随着f1的上升,T与I2的关系不再确定不变。当f1上升时,在ω2不变条件下,转子电流成反比地减小,若同时考虑到f1上升、主磁通减小还要引起电动机励磁电流Io减小,即是说f1上升时电动机的定子电流在ω2不变的条件下出现了一定的裕度。这就允许在运行中适当加大转差角频率ω2。ω2的加大,将使电磁转矩加大。可以脱离T∝1/f12的关系,而向T∝1/f1的方向靠拢。基于上述原因,人们认为恒压运行方式是近似的恒功率方式。技术资料中所说的恒功率调速一般是指恒压方式,而不是指E21/f1=C。
在这种情况下,随f1的上升,机械特性较E21/f1=C的情况硬度变得更小,临界转矩也将更小。
通常情况下,上述的恒转矩调速方式、恒功率调速方式,应与机械负载的转矩特性相匹配。这种匹配关系的一个例子示于图2-45中。
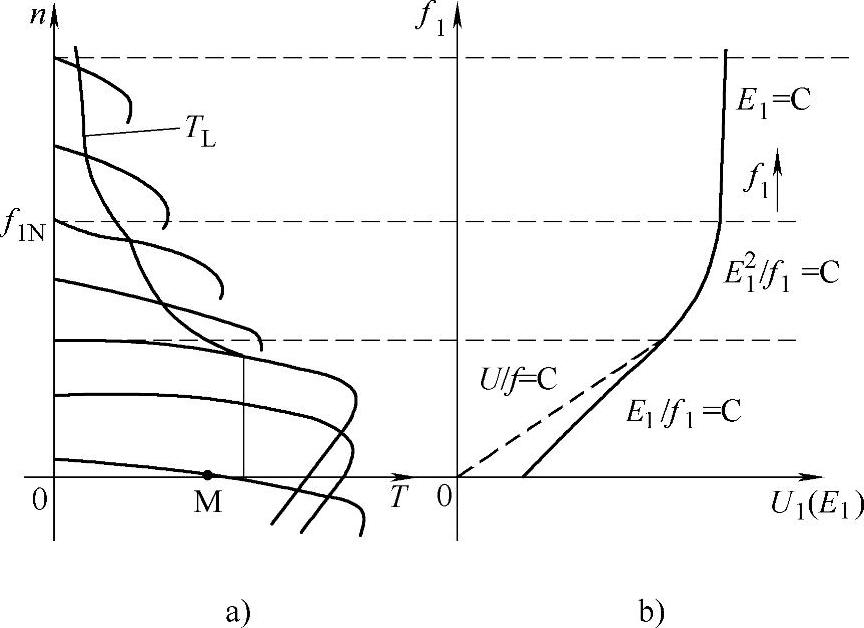
图2-45 不同调速方式下的转矩特性
a)机械特性 b)协调控制条件
由于恒功率运行和恒压运行两种方式通常是在高速区。电动机的电压U1和感应电动势E1的值比较大,定子漏阻抗压降相对于U1或E1常可以忽略不计。因此,图2-45中的协调控制条件,E21/f1=C可以用U21/f1=C或者U21/n=C(n为电动机轴转速)的关系来近似。E1=C,f1↑也可以用U1=C,f1↑来近似。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。