



上面谈到的情况,制动中电动机均处于再生发电制动状态。下面说明电动机处于能耗制动状态的情况。通用变频器向异步电动机的定子通直流电时(这意味着逆变器中某3个桥臂短时间内斩波导通,不再换相),异步电动机便处于能耗制动状态。这种情况下,变频器的输出频率为零,异步机的定子磁场不再旋转,转动着的转子切割这个静止磁场而产生制动转矩。旋转系统存储的动能转换成电能消耗于异步电动机的转子回路中。
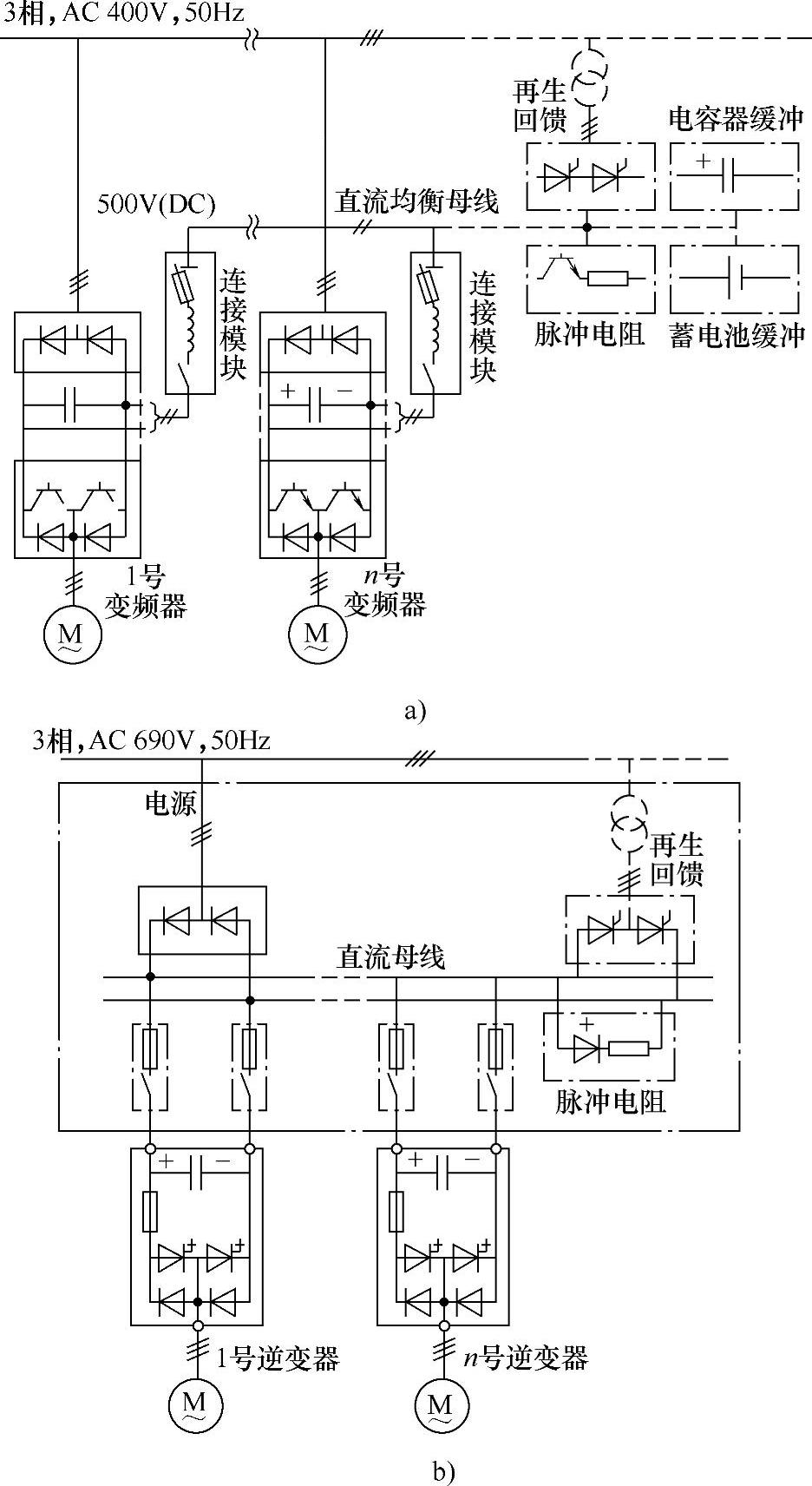
图2-41 共用母线方式
a)多台变频器在共用直流均衡母线上控制多台电动机运行
b)多台变频器用共用直流母线方式控制多台电动机运行
这种变频器输出直流的制动方式,在通用变频器的资料中称为“DC制动”(即“直流制动”)。
这种DC制动方式的用途主要有两种:一是用于准确停车控制;二是用于制止在起动前电动机由外因引起的不规则自由旋转。
一种可能的准确停车方案如图2-42所示。图2-42a表示通用变频器的输出频率和DC制动中电动机转速随时间的变化规律,图2-42b为与图2-42a相对应的异步电动机的静态机械特性。如图2-42a所示,在运行信号的作用下,变频器首先开始连续降频,达到fDB后则开始直流制动,使输出频率变为零。电动机则经历再生发电制动和能耗制动后最终停止。如果调整得当,生产机械将准确地停止在预定位置上。
通用变频器中对直流制动功能的控制,主要通过设定DC制动起始频率fDB、制动电流IDB和制动时间tDB来实现,fDB、IDB和tDB的意义如图2-42a所示。(https://www.xing528.com)
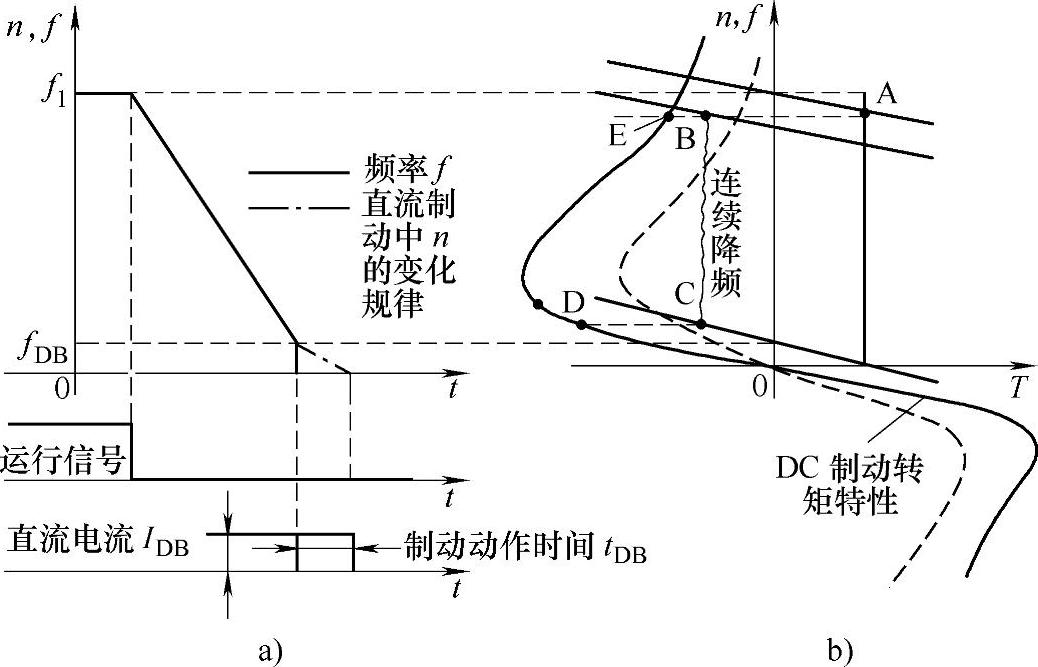
图2-42 利用DC制动实现准确停车
a)时序关系 b)静态机械特性
通常情况下,起始制动频率不宜设定得太高。例如图2-42a中的fDB是比较合适的。在这个fDB下,电动机的运行情况如图2-42b所示,经历了A→B→C→D→0的减速停车过程。其中,B→C的连续降频过程中,电动机处于再生发电制动状态,而频率小于fDB的D→0阶段,电机处于能耗制动状态(即所谓DC制动状态)。
如果起始制动频率取得太高,例如取成图2-42中的f1,则不合理。由于制动直流电流IDB可以人为设定在一个恰当的值,使逆变器输出电流可以被限制在允许的范围内,单纯就逆变器而言,似乎是合理的;但是,对电动机而言,制动一开始其运行工作点将由图2-42b中的A点过渡到E点。而在E点,异步电动机的转子电流的频率和幅值都会很高,转子铁损耗也很大,导致电动机发热严重;但得到的制动转矩却并不太大。显然这是不合理的。如果生产机械要求频繁制动停车,更不宜将fDB设定得太高,不然电动机将过热。
IDB的设定,实际上是对异步电动机定子电流的设定。IDB不同,异步电动机DC制动状态下的转矩特性亦不同。图2-42b中的两条转矩特性相比较,显然虚线所示的特性所对应的IDB比较小。
电动机由fDB所对应转速减速到零所用的时间由旋转系统的GD2、生产机械的静阻力矩和变频器IDB设定值等共同决定。如果这个时间大于变频器的最大可能的tDB(见图2-42a),电动机可能进入自由停车的滑行状态,这一点应当注意。
对于风机类负载,当处于停车状态时,电动机可能由于风筒中风压的作用而自由旋转,有时还可能反转。因此,对于这种情况,可以利用直流制动功能在起动前使其迅速静止下来,保证设备从零速开始起动。这就是有些资料中所说的DC制动功能在起动时的应用(见表3-11)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。