



【摘要】:在风力—燃料电池系统模型中[17],发电机控制器是用后差分法推导的离散时间比例积分微分控制器。后差分法基于Euler法,是无条件稳定的[23]。表8-2 离散和连续时间比例积分微分控制器参数(续)在低于额定风速条件下,风力涡轮机是在变速模式下运作。lambda-控制器通过调整加在发电机上的场电压来维持恒定尖端速度比λ=6.5。在高于额定风速ue=8m/s的条件下,omega-控制器把风力涡轮机转子速度调节到恒定值ω=16rad/s。控制再一次是通过调节发电机场电压来实现的。
在风力—燃料电池系统模型中[17],发电机控制器是用后差分法推导的离散时间比例积分微分控制器。后差分法基于Euler法,是无条件稳定的[23]。控制器的一般传递函数是[24]:
G(z)=(q0+q1z-1+q2z-2)/(1-z-1) (8-14)
在模拟中所使用的控制器形式是
y(k)=y(k-1)+q0e(k)+q1e(k-1)+q2e(k-2) (8-15)
式中 e(k)——误差信号(控制器的输入);
y(k)——控制器的输出信号。
q项是从比例积分微分常数得到的:
q0=Kp[1+(Td/Ts)]
q1=Kp[(Ts/Ti)-2(Td/Ts)-1](https://www.xing528.com)
q2=Kp(Td/Ts) (8-16)
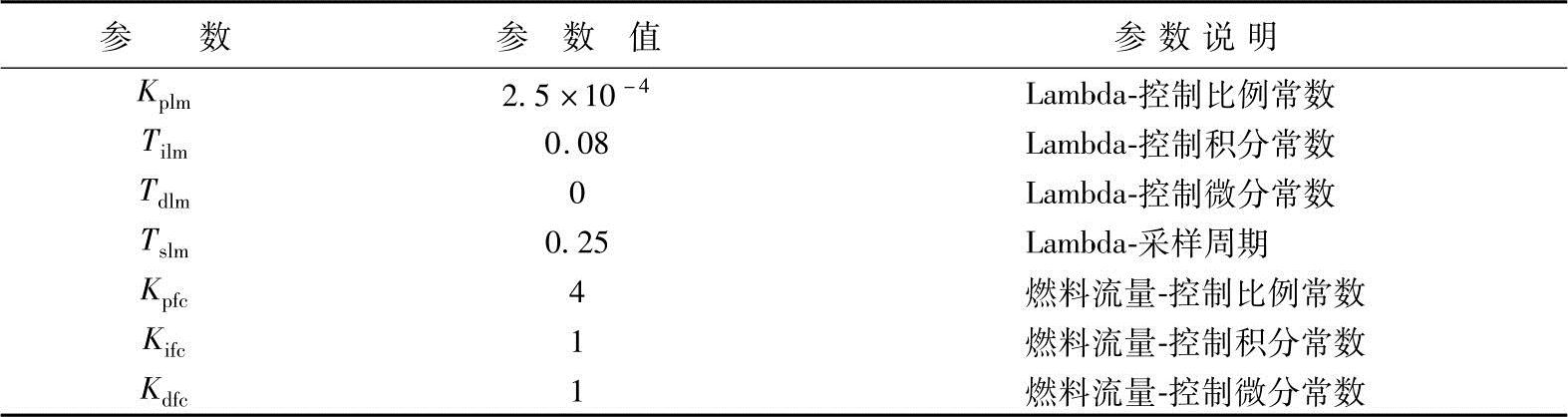
式中Kp,Ti和Td分别是比例、积分和微分常数。控制器采样时间是Ts。我们保留了Iqbal用的控制器的原来形式,只调整了增益。所有的比例、积分、微分控制参数列于表8-2中。
表8-2 离散和连续时间比例积分微分控制器参数

(续)
在低于额定风速条件下,风力涡轮机是在变速模式下运作。lambda-控制器通过调整加在发电机上的场电压来维持恒定尖端速度比λ=6.5。使用λ=6.5而不是5.8的最优值是为了方便。因为适当调节lambda值会使转子速度(单位rad/s)是风速的两倍(单位rad/s)。在高于额定风速ue=8m/s的条件下,omega-控制器把风力涡轮机转子速度调节到恒定值ω=16rad/s。控制再一次是通过调节发电机场电压来实现的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。