



燃料电池汽车包括几个300~400V的高压部件,如牵引电动机、逆变器驱动系统、电池、直流-直流转换器等。
燃料电池汽车电动机的电力需求范围是75~120kW。随着电力电子和微控制器的巨大进步,结构紧凑、低成本、高效率的逆变器使燃料电池汽车使用交流感应电动机和无刷永磁电动机成为可能。一般说来,与直流有刷电动机相比,这些电动机在很大范围内都提供高效率,但这些发动机需要复杂的控制计划,如空间向量脉宽调制(Space Vector Pulse Width Modulation,SVPWM),通过处理电流和转子位置的反馈信号来得到所需的转矩。牵引电动机在燃料电池汽车中扮演重要角色。牵引电动机汽车应用的主要特点是[26]:
●高转矩密度和功率密度。
●在低速启动和爬山时的高转矩,在高速度巡航时的高功率。
●在基准速度3~4倍的大速度范围内,以恒定功率工作是机器峰值转矩要求和逆变器伏安额定值之间很好的折中。
●在很大的速度和转矩范围内(包括低转矩),可以高效率地工作。
●间歇过载能力通常是短持续时间额定转矩的两倍。
●适宜高可靠性和耐用性的汽车环境。
●可接受的成本。
图6-12所示是用于牵引的永久磁铁同步或永久磁铁无刷电动机、感应电动机和开关磁阻电动机。
图6-13所示的是牵引应用所需的转矩/功率-速度特性。图6-14所示的是为这些应用的理想化转矩/功率-速度特性。(https://www.xing528.com)
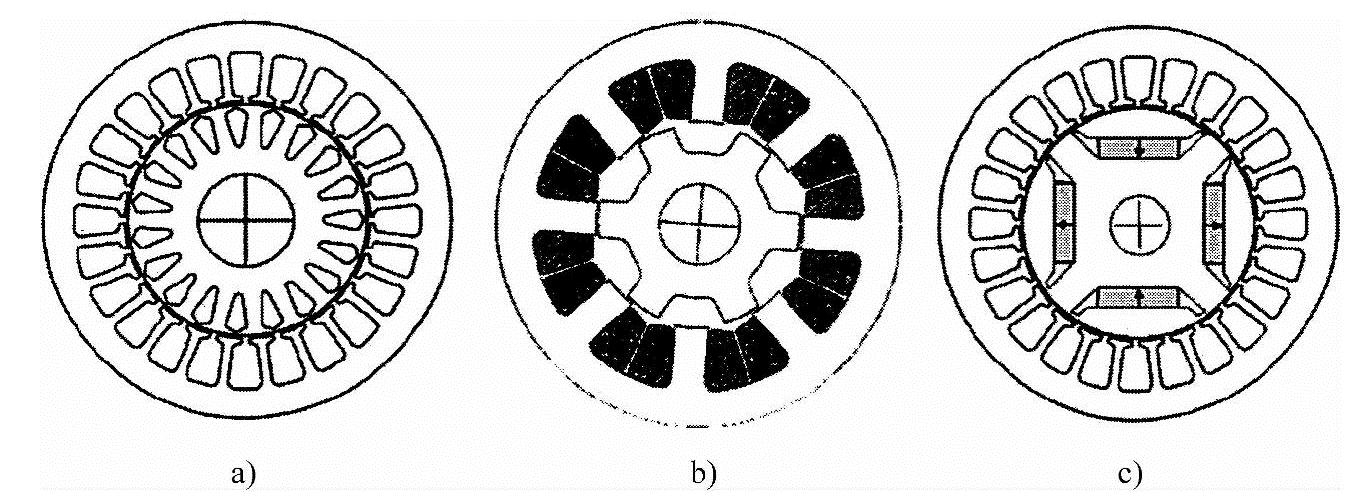
图6-12 主要的牵引机技术[30]
a)IM,Induction Machine感应电动机 b)SRM,Switched Reluctance Machine开关磁阻电动机 c)PMM,Permanent Magnet Machine永久磁铁电动机
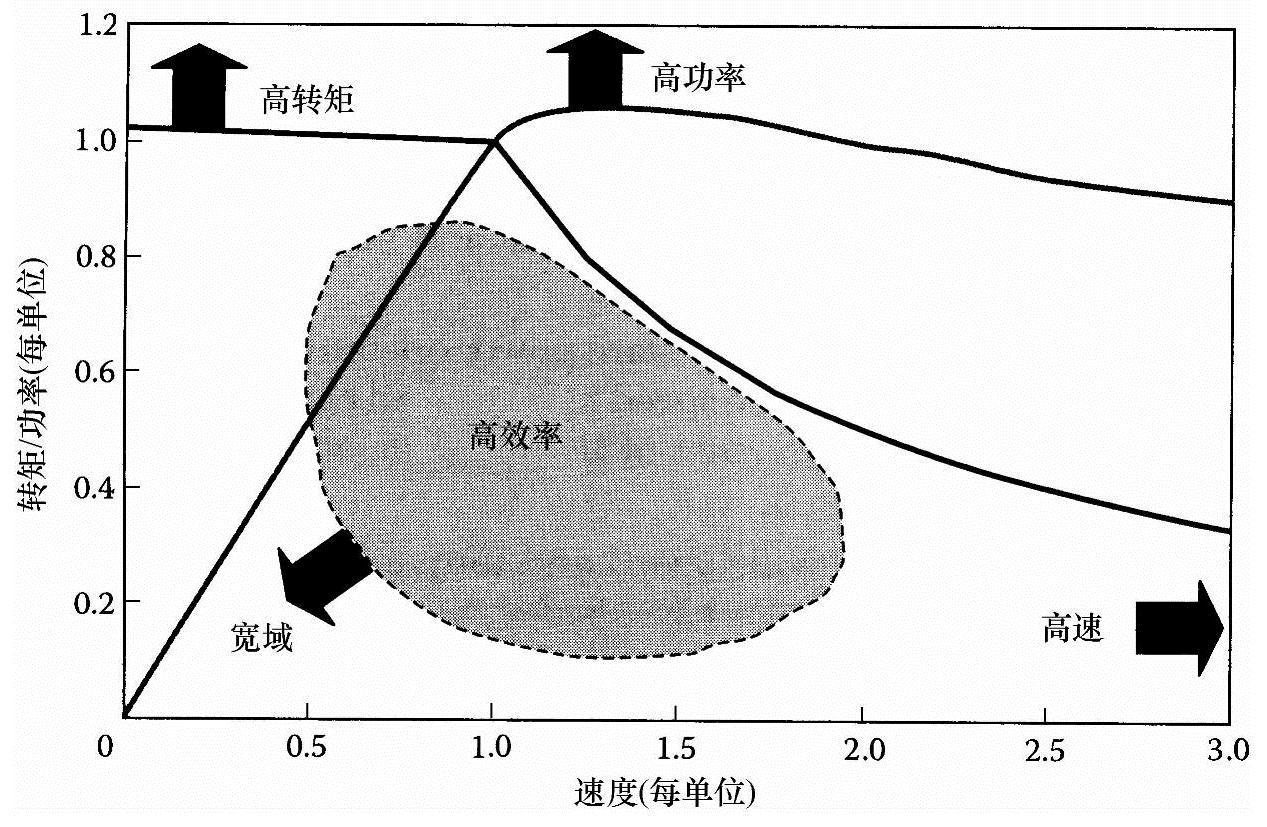
图6-13 牵引机的转矩和功率需求(出自Zhu,Z.Q.and Howe,D.,Proc.IEEE,95(4),746,2007.许可使用)
在图6-14中,可以看到三个转矩/功率的区域。在恒定转矩区Ⅰ,尤其是在低速区,最大转矩能力是由逆变器的额定电流和逆变器输出电压大小对逆变器频率的比值决定的,而且是被调整来保持这个区域的气隙磁通恒定的[27];当达到最大逆变器电压时,恒定转矩区Ⅰ就切换到恒定功率区Ⅱ。在这个区域里,定子电压保持在额定值,同时调节定子电流来获得恒定功率[28]。由于逆变器的电压和电流限制,电动机工作在弱磁通区。在这种模式下,随着频率的不断增加,通过增加转差率来维持定子电流在极限以内,按低气隙磁通工作;当转差率达到对应于拉出转矩的值时,区域Ⅱ切换到区域Ⅲ。在区域Ⅲ,定子电压保持在额定值,并且调节转差率略低于其拉出转矩值。转差率将一直保持略低于其拉出转矩值。因为背向电动势(Back Electromotive Force,EMF)的影响越来越大,转矩和功率降低。在牵引应用中,需要很大范围的速度控制,甚至超出恒定功率区域。
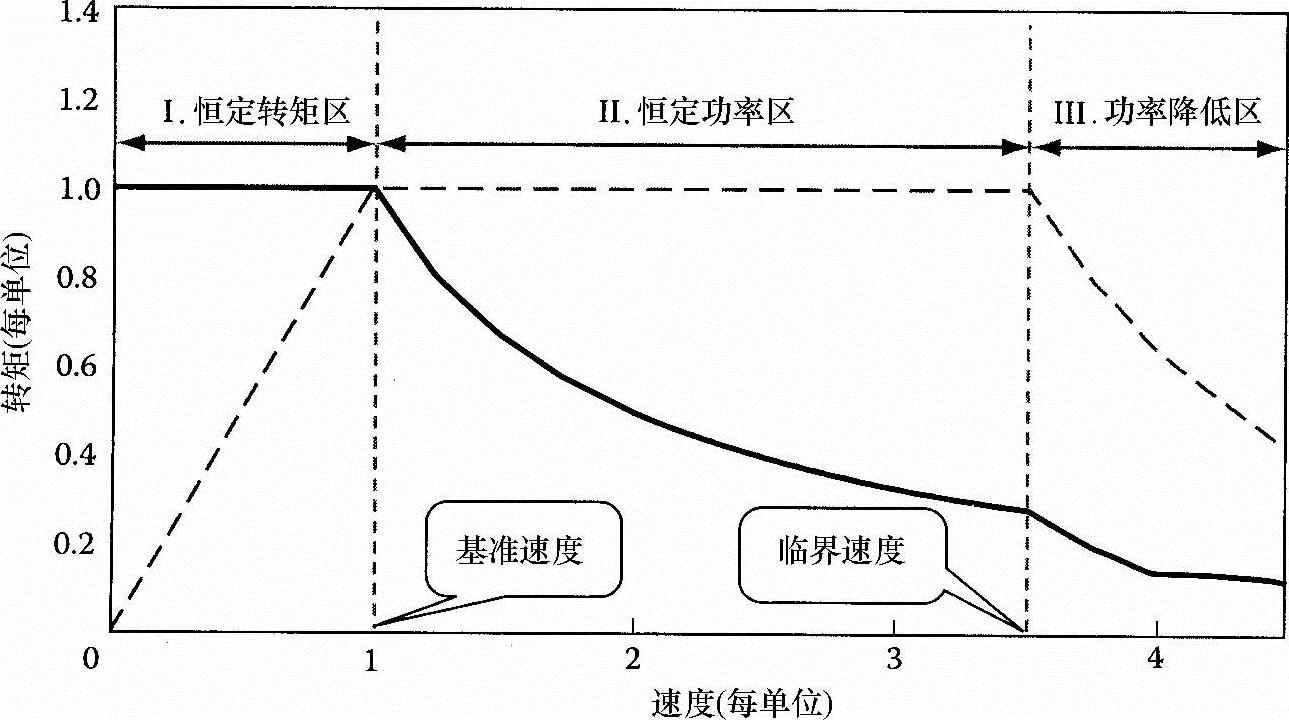
图6-14 牵引机应用的理想化转矩/功率-速度特性曲线(出自Zhu,Z.Q.and Howe,D.,Proc.IEEE,95(4),746,2007.许可使用)
由于感应电动机简单可靠,而且有很大的速度范围,它很适合牵引应用。因为感应电动机可以用d-q模型模拟,其性能就像直流电动机[25],所以通过磁场定向控制(向量控制),或直接转矩控制,就可以得到良好的动态转矩控制性能。然而,因为转子有损耗,而且体积比同等功率和速度级的永磁电动机大,感应电动机的效率比永磁电动机的要低。永磁电动机具有高效率、高转矩和高功率密度,但与感应电动机相比,它的固定范围短,会限制磁场削弱能力。开关磁阻电动机对于牵引应用也是一个好的选择,因为它的结构简单和坚固、控制简单、具有极高操作速度的能力以及运作无公害[25]。但是,开关磁阻电动机并没有被广泛采用,而且比其他电动机更昂贵。电动机控制器-逆变器系统用绝缘栅双极晶体管(Insulated Gate Bipolar Transistors,IGBT)作为高功率开关器件,把电池或燃料电池的直流电转换成交流电来控制交流和无刷永磁电动机。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。