



为了推导出一个简化的非线性动态燃料电池模型,我们做以下假设:
●由于电池堆温度的动态变化慢,假定平均电池堆温度是恒定的。
●可以很好地控制相对湿度略高于100%,因此液体水总能生成在电池堆。同时水箱和水分离器完美地控制这些液态水,可以避免水淹现象。
●反应物持续供给燃料电池,使它能在足够高的流率下工作。
●为了建立燃料电池的简化动态模型,假定入口反应物的摩尔分数是恒定的。换句话说,纯氢气(99.99%)被直接输入到阳极,氮气和氧气按21∶79的空气比例均匀混合输入到阴极。
●为了利用线性反馈,必须测量完全状态[14]。
我们使用理想气体定律和摩尔守恒定律,定义氢气、阳极的水、阴极的氧气、氮气和水的分压为燃料电池的状态变量。图3-5表示入口气体和出口气体之间的关系[15]。
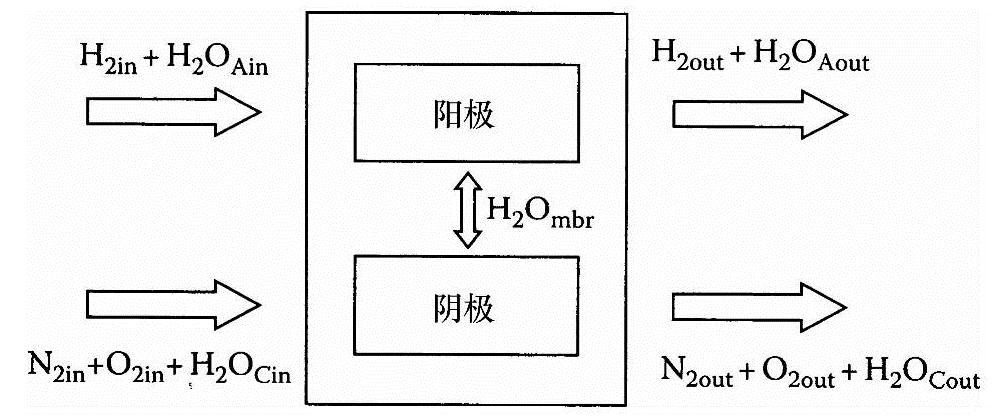
图3-5 质子交换膜燃料电池的气体流动示意图
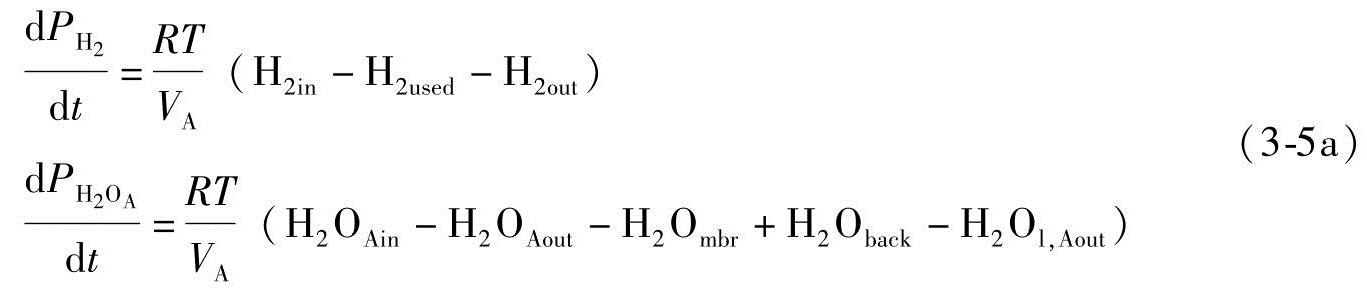
下面的公式给出了分压的导数:
阳极摩尔守恒
阴极摩尔守恒
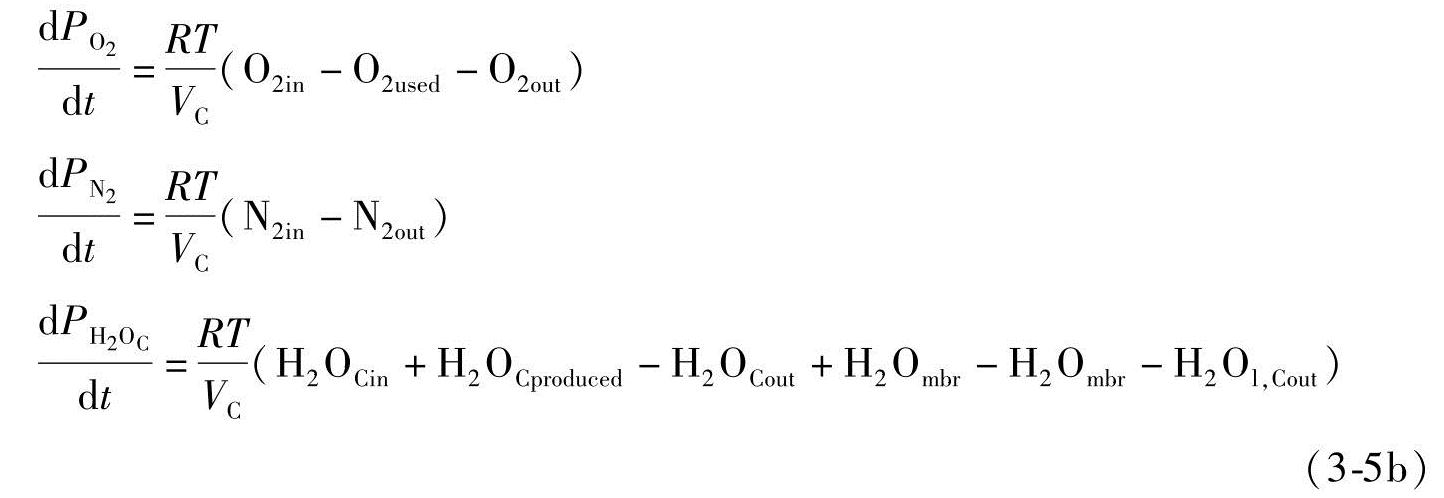
式中H2in、O2in、N2in、H2OAin和H2OCin分别是氢气、氧气、氮气、阳极侧、阴极侧水的入口流率。此外,H2out、O2out、N2out、H2OAout和H2OCout是每种气体的出口流率。H2used、O2used和H2OCproduced分别是气体的使用率和产生率。一般来说,入口水流过膜的流率H2Ombr是电池堆电流和膜含水量λm的函数。假定λm=14[7,16],H2Ombr只是电流密度的函数[7,16],并且H2Ombr=1.2684(N·Afc·Ifc)/F,其中Afc(cm2)是燃料电池的有效面积,N是燃料电池的数量,Ifc是燃料电池的电流密度。此外,为了更准确地描述一个动态模型,可以定义水从阴极向阳极的回流为H2Ov,back=γ·H2Ov,mbr[2]。当含水量λm=14时,回流系数β的测量值是6×10-6(cm2/s)[2]。液体水离开阳极和阴极的流率是H2Ol,Aout和H2Ol,Cout。它们取决于每种气体的饱和程度[7]。为了估计液体水,必须用水蒸气饱和压力来计算水蒸气最大质量,公式如下:

饱和压力pvs可以根据文献[17]中的一个公式计算:
log10(pvs)=-1.69×10-10T4+3.85×10-7T3-3.39×10-4T2+0.143T-20.92 (3-7)
式中饱和压力pvs的单位是kPa,温度T的单位是K。如果式(3-5a)和式(3-5b)中水的质量比式(3-6)中最大水蒸气质量大,可以同时形成液体水。液体水和水蒸气质量的计算方法如下[7]:
逻辑1
如果mw,A or C≤mv,max A or C→mv,A or C=mw,A or C,ml,A or C=0;
如果mw,A or C>mv,max A or C→mv,A or C=mv,max A or C;
ml,A or C=mw,A or C-mv,max A or C
因此,βA or C可以用来估计在方程(3-8)中液态水的形成。根据逻辑1,如果mw,A or C≤mv,max A or C,那么βA or C=0;否则βA or C=1,因此,H2Ol,Aout和H2Ol,Cout定义如下

式中 是水的摩尔质量,为18.02g/mol。我们定义所有的流率、气体使用率和产生率的单位是mol/s。然而,由于我们假设相对湿度都超过100%,水是液态的,βA or C是1,这意味着在模拟中
是水的摩尔质量,为18.02g/mol。我们定义所有的流率、气体使用率和产生率的单位是mol/s。然而,由于我们假设相对湿度都超过100%,水是液态的,βA or C是1,这意味着在模拟中 。VA和VC分别是阳极和阴极的体积,它们的单位是m3。根据电化学的基本关系,使用和产生的气体是电池电流密度的函数[4]:
。VA和VC分别是阳极和阴极的体积,它们的单位是m3。根据电化学的基本关系,使用和产生的气体是电池电流密度的函数[4]:
 (https://www.xing528.com)
(https://www.xing528.com)
为了简化起见,我们定义

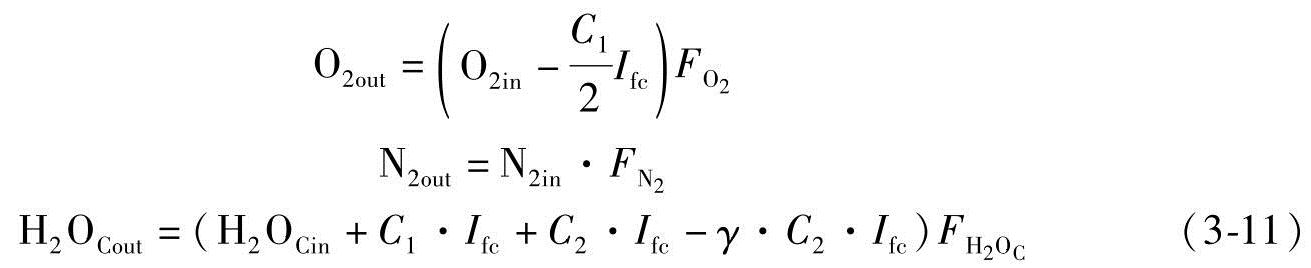
因此,在式(3-5a)和式(3-5b)中,H2Ombr和H2Ov,back可以用C1和C2简化。有了实测的入口流率和电池堆电流,出口流率就是阳极和阴极入口流率Anodein和Cathin,减去气体使用率和产生率以及文献[13]中提出的压力分数。Anodein的定义是H2in+H2OAin,Cathin的定义是O2in+N2in+H2OCin。
阳极侧出口流率是

阴极侧出口流率是
式中 ,
, ,
, ,
, 和
和 分别是燃料电池内各种气体的压力分数,给出如下[18]:
分别是燃料电池内各种气体的压力分数,给出如下[18]:


为了分析燃料电池的瞬态性能,我们要考虑到Chiu等人提出的每种气体的压力分数[18]。在文献[18]中,只考虑到3种压力分数 、
、 和
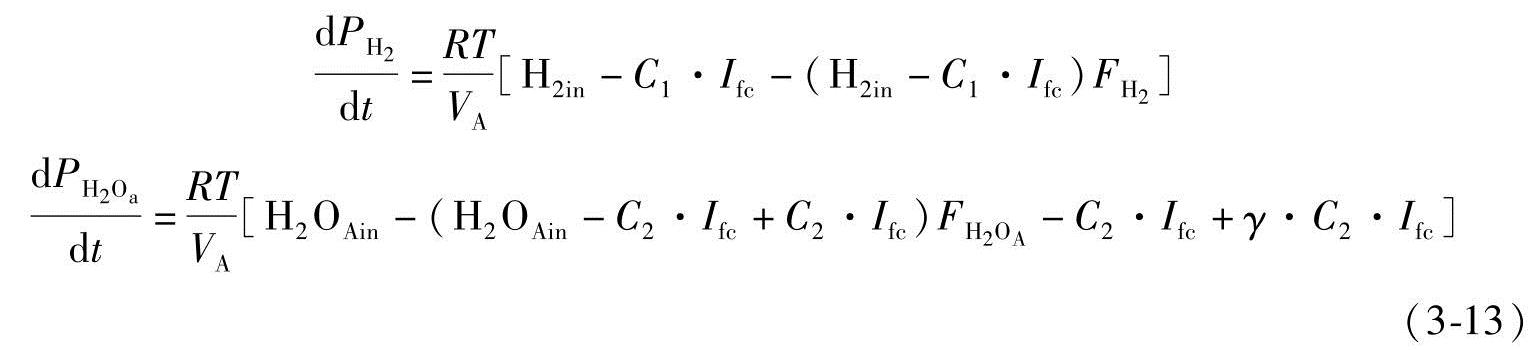
和 。但在我们的研究中,考虑到了所有气体的压力分数,因此得到更精确的燃料电池动态模型和比以往研究[3,7,18,19]更好的燃料电池瞬态特性分析。把式(3-10)和式(3-12)代入式(3-5a)和式(3-5b),可以得到状态方程[式(3-13)和式(3-14)]。
。但在我们的研究中,考虑到了所有气体的压力分数,因此得到更精确的燃料电池动态模型和比以往研究[3,7,18,19]更好的燃料电池瞬态特性分析。把式(3-10)和式(3-12)代入式(3-5a)和式(3-5b),可以得到状态方程[式(3-13)和式(3-14)]。
阳极侧新的状态方程是
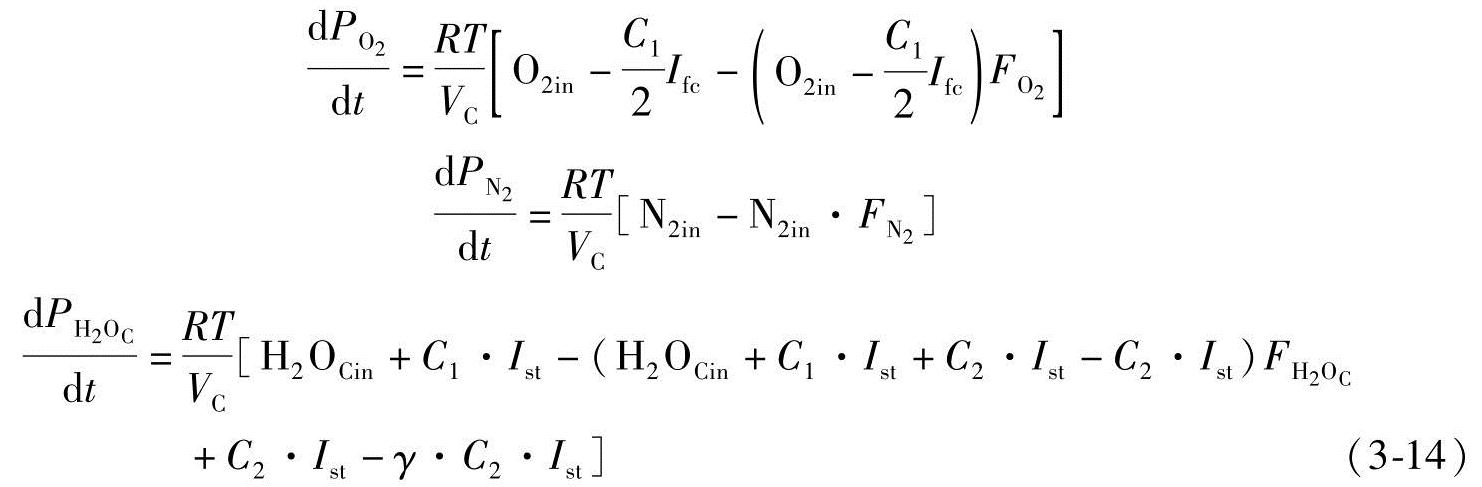
阴极侧新的状态方程是
因为初始摩尔分数 和
和 分别被设为0.99,0.21和0.79[3,7,19],所以输入值H2in,O2in和N2in由摩尔分数定义如下:
分别被设为0.99,0.21和0.79[3,7,19],所以输入值H2in,O2in和N2in由摩尔分数定义如下:

在阳极和阴极入口,水流率可以用相对湿度、饱和压力和每侧的总压力来表达如下[2]:

式中,φa和φc分别是在阳极和阴极侧的相对湿度, 是阳极分压的总和,
是阳极分压的总和, 是阴极分压的总和。Pvs是饱和压力,可以在热力学表中找到[20]。相对湿度φa和φc,可以由阳极注入水ua_ h和阴极注入水uc_ h来定义。此外,Anodein和Cathin分别定义为输入控制变量ua和uc与每侧转换因子ka和kc的乘积[11,18],单位也由标准升/秒(L/s,Standard Liters Per Minute,SLPM)变为摩尔/秒(mol/s)。换句话说,
是阴极分压的总和。Pvs是饱和压力,可以在热力学表中找到[20]。相对湿度φa和φc,可以由阳极注入水ua_ h和阴极注入水uc_ h来定义。此外,Anodein和Cathin分别定义为输入控制变量ua和uc与每侧转换因子ka和kc的乘积[11,18],单位也由标准升/秒(L/s,Standard Liters Per Minute,SLPM)变为摩尔/秒(mol/s)。换句话说,
Anodein=ua·ka
Cathin=uc·kc (3-17)
式中的转换因子ka和kc分别是0.065mol/s。假定氢气和空气化学计量比是恒定的,这样可以保证这两种反应物被持续送入并流过电池堆[20]。因此,燃料电池控制主要依靠输入控制变量ua和uc。首先,阳极气压 和阴极气压
和阴极气压
 将分别由ua和uc控制,以避免不必要的压力波动,防止膜电极组件的损坏,帮助延长燃料电池堆的寿命[15]。因为注水系统有一个非常缓慢的时间常数τd约70s[21],我们可以用一阶时间延迟注入水ua_h和uc_h来控制两侧的相对湿度。因此,在燃料电池动态模型中,我们为水注入使用一阶时间延迟模型,水注入输入和相对湿度关系的状态方程可以推导如下:
将分别由ua和uc控制,以避免不必要的压力波动,防止膜电极组件的损坏,帮助延长燃料电池堆的寿命[15]。因为注水系统有一个非常缓慢的时间常数τd约70s[21],我们可以用一阶时间延迟注入水ua_h和uc_h来控制两侧的相对湿度。因此,在燃料电池动态模型中,我们为水注入使用一阶时间延迟模型,水注入输入和相对湿度关系的状态方程可以推导如下:

式中φ是相对湿度。从式(3-16)可以看到,每个水注入输入是湿度的函数,水注入输入也影响压力的控制。因此,可以建立一个质子交换膜燃料电池的动态模型。我们将在第四章详细描述控制设计。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。