



【摘要】:图7-11 角度前方交会7.3.1.1 角度前方交会的计算方法计算已知边AB的边长和方位角。计算待定边AP、BP的边长,按三角形正弦定律,得计算待定边AP、BP的坐标方位角。图7-12 三点前方交会7.3.1.3 角度前方交会计算实例见表7-4。
如图7-11所示,A、B为坐标已知的控制点,P为待定点。在A、B点上安置经纬仪,观测水平角α、β,根据A、B两点的已知坐标和α、β角,通过计算可得出P点的坐标,这就是角度前方交会。
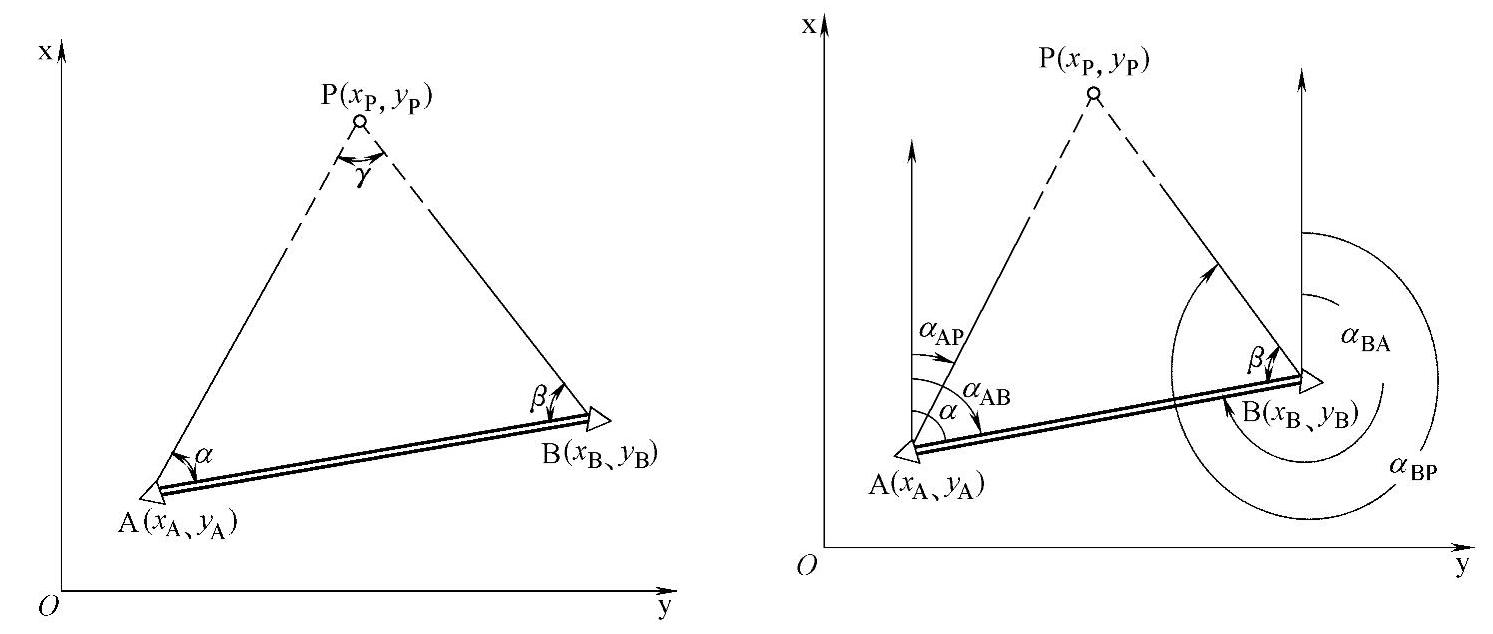
图7-11 角度前方交会
7.3.1.1 角度前方交会的计算方法
(1)计算已知边AB的边长和方位角。根据A、B两点坐标(xA,yA)、(xB,yB),按坐标反算公式计算两点间边长DAB和坐标方位角αAB。
(2)计算待定边AP、BP的边长,按三角形正弦定律,得

(3)计算待定边AP、BP的坐标方位角。

(4)计算待定点P的坐标。


适用于计算器计算的公式:
 (https://www.xing528.com)
(https://www.xing528.com)
在应用式(7-18)时,要注意已知点和待定点必须按A、B、P逆时针方向编号,在A点观测角编号为α,在B点观测角编号为β。
7.3.1.2 角度前方交会的观测检核
在实际工作中,为了保证定点的精度,避免测角错误的发生,一般要求从三个已知点A、B、C分别向P点观测水平角α1、β1、α2、β2,作两组前方交会。如图7-12所示,分别在△ABP和△BCP中计算出P点的两组坐标P′(xP′、yP′)和P″(xP″、yP″)。当两组坐标较差符合规定要求时,取其平均值作为P点的最后坐标。
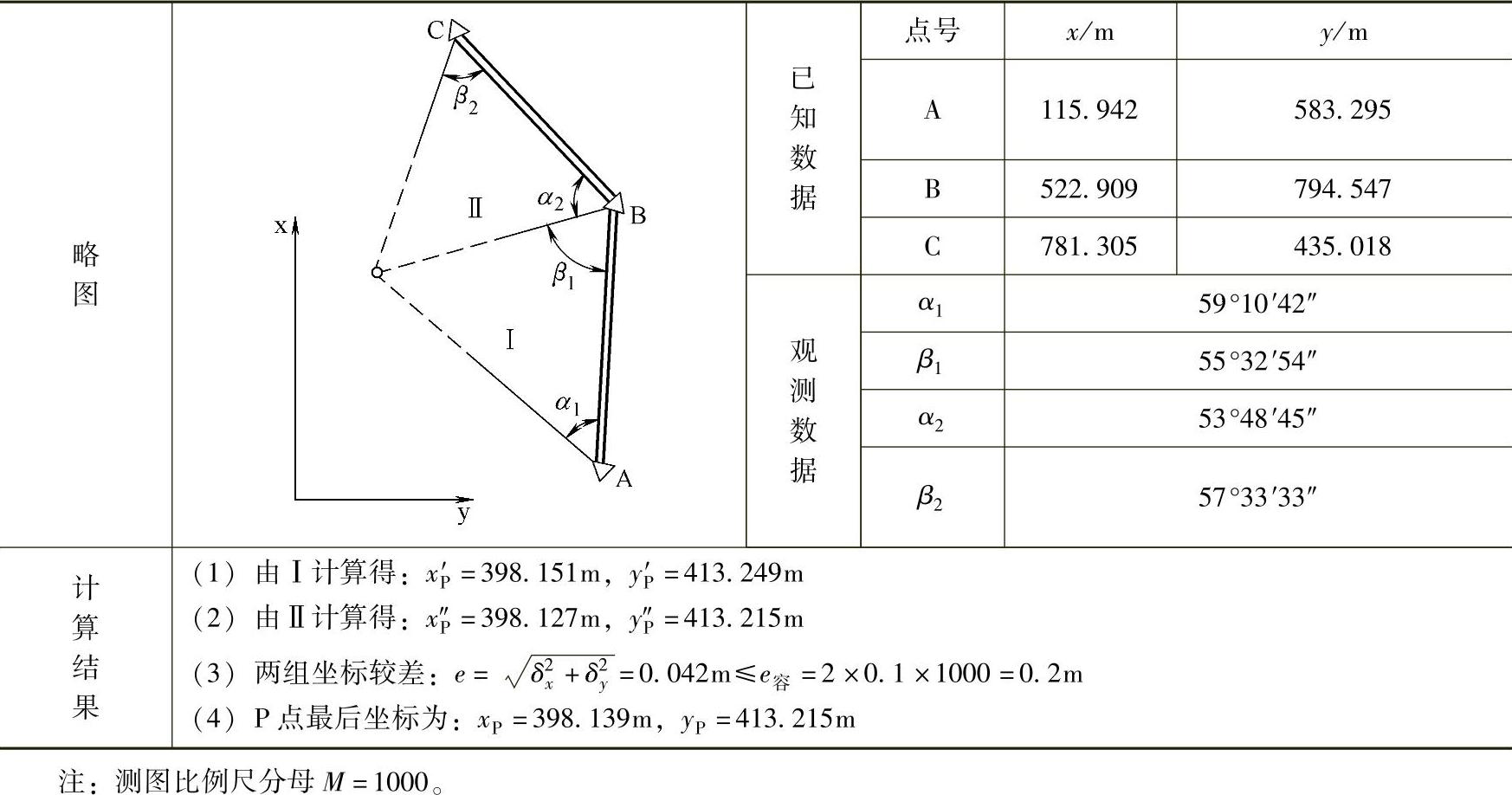
一般规范规定,两组坐标较差e不大于两倍比例尺精度,用公式表示为

式中 δx=xP′-x″P;δy=yP′-y″P;
M——测图比例尺分母。
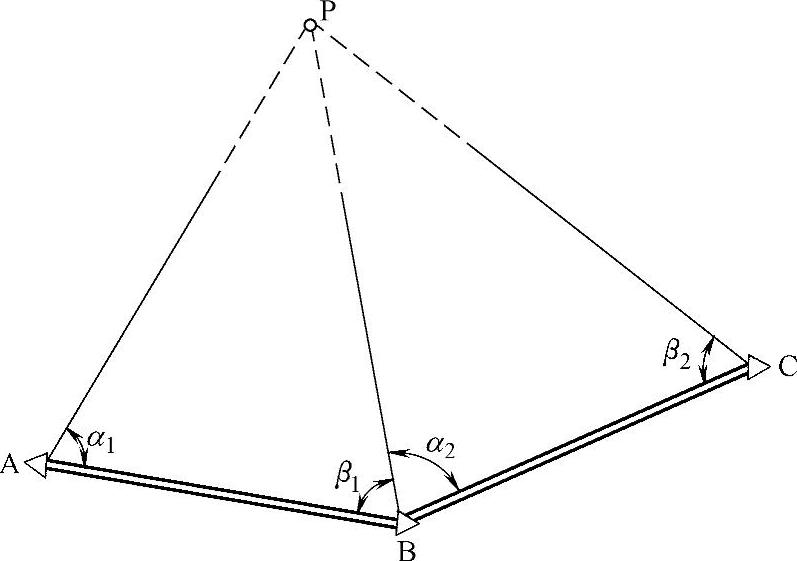
图7-12 三点前方交会
7.3.1.3 角度前方交会计算实例见表7-4。
表7-4 前方交会法坐标计算表
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。