



【摘要】:全圆测回法也称为方向观测法,观测三个及以上的方向时,通常采用全圆测回法,它是以某一目标作为起始方向,依此观测出其余各个目标相对于起始方向的方向值,测后根据方向值计算水平角值。上、下半测回合起来称为一测回。表3-2为全圆测回法记录簿的记录表。图3-8 全圆测回法示意图表3-2 全圆测回法记录簿的记录表对同一方向盘左、盘右读数之差,称为两倍照准误差2c,即2c=R左- (3-2)式中 R——任一方向的方向观测值。
全圆测回法也称为方向观测法,观测三个及以上的方向时,通常采用全圆测回法,它是以某一目标作为起始方向,依此观测出其余各个目标相对于起始方向的方向值,测后根据方向值计算水平角值。全圆测回法示意图如图3-8所示,设在测站O上需要观测A、B、C、D四个目标的水平方向值,用全圆方向法观测的方法和步骤如下:
(1)安置经纬仪于O点,盘左位置,使度盘读数置于0°附近,瞄起始方向A,得读数a1。
(2)顺时针转依次瞄准B、C、D,得相应读数为b、c、d。
(3)再次瞄准目标A,得读数为a2,a1与a2差的绝对值称归零差。使用DJ6,允许值为18″,若符合,则取a1与a2的平均数。以上完成上半测回,上半测回的观测顺序为A→B→C→D→A。
(4)盘右位置,逆时针方向依次瞄准A、D、C、B、A,分别读取读数,并计入观测薄中。
(5)再逆时针转动照准部瞄准零目标点A,读取水平读盘读数并计算归零误差是否超限,限差规定同上半测回。以上完成下半测回,下半测回的观测顺序为A→D→C→B→A。
上、下半测回合起来称为一测回。表3-2为全圆测回法记录簿的记录表。

图3-8 全圆测回法示意图(https://www.xing528.com)
表3-2 全圆测回法记录簿的记录表
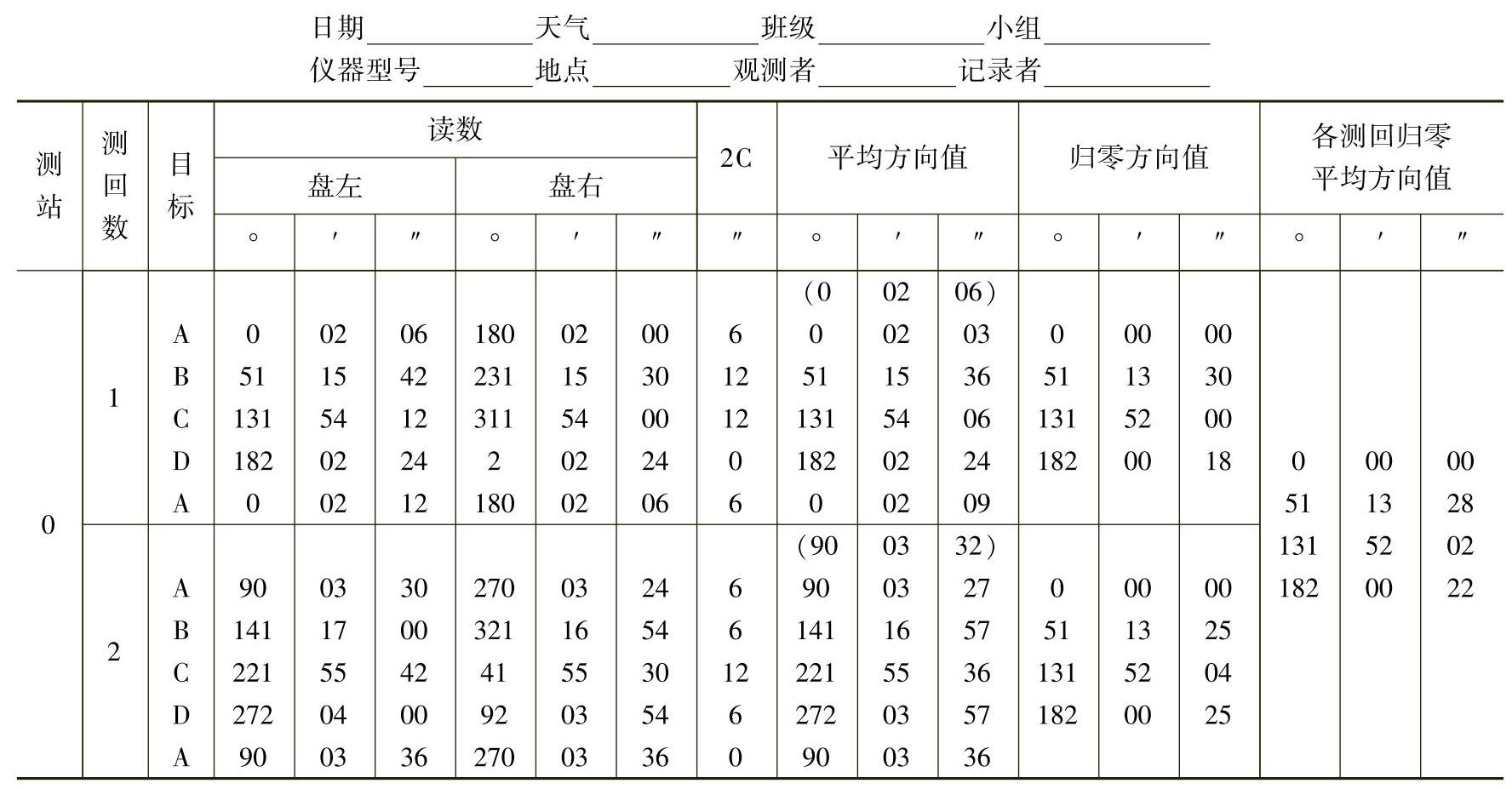
对同一方向盘左、盘右读数之差,称为两倍照准误差2c,即
2c=R左-(R右±180°) (3-2)
式中 R——任一方向的方向观测值。对于每一个方向取盘左、盘右读数的平均值,称为平均方向值,即

其余目标的方向值与第一个目标方向值(化为0°00′00″)的差值,称为归零方向值。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。