



绕线转子异步电动机的起动、调速及正反转控制电路经常采用凸轮控制器来实现,尤其对一些容量不太大的绕线转子异步电动机,用得更多,因为它运行可靠,维修方便。一些小型卷扬机及桥式起重机上大部分都采用这种控制电路。绕线转子异步电动机用凸轮控制器的控制电路如图3-50所示。
在图3-50中,M是小容量绕线转子异步电动机,R是起动用电阻器,QS是转换开关,FU1、FU2分别是保护主电路和控制电路的短路保护熔断器;GL是过电流继电器,作为电动机过载保护用;SQ1、SQ2分别是正转和反转的限位保护开关;TL为凸轮控制器。
电动机欲工作时,闭合QS,将手柄转至“0”位置,这时最下边的三副触头SA5~SA7闭合,为控制电路接通做好准备。按动起动按钮SB2,接触器KM线圈获电工作,其主触头闭合,接通电源,为电动机起动做好准备,其常开触头KM闭合自锁。然后将手柄扳至正转“1”位置,这时触头SA1、SA3、SA5闭合,控制电路接通,电动机与三相电源接通,电动机正转起动。此时电动机转子绕组接入了全部电阻R,所以起动电流较小,起动转矩也较小,此时,如果电动机的负载很重,则不能起动,但可以起到消除传动齿轮间隙的作用。当手柄板至正转“2”位置时,SA1、SA3、SA5和XZ1闭合,使电阻器R上的第一级电阻被短接,电动机转速加快。同样道理,当手柄扳至“3”,“4”位置时,触头XZ2和XZ3先后闭合,使电阻器R的两级电阻相继不对称短接,电动机继续加速,当手柄扳至“5”位置时,XZ1~XZ5五副触头全部闭合,电阻器R全部电阻被短接切除,电动机起动完毕,全速运转。
当手柄扳到反转的“1-5”位置时,SA2和SA4触头闭合,三相电源的相序改变,电动机反向旋转,这时触头SA7闭合,控制电路仍然接通,接触器KM继续获电工作。凸轮控制器反向起动切换电阻的动作原理与正转类同。(https://www.xing528.com)
凸轮控制器最下面的三副触头SA5、SA6、SA7只有当手柄扳到“0”位置时,才能全部闭合。而在其他各档位置均为只有一副闭合,而其余两副断开,该三副触头在控制电路中作这样的位置安排,可以保证手柄必须处在“0”位时,三副触头全部闭合之后,再按起动SB2,才能使接触器KM线圈获电工作,而达到逐级起动的目地,而其余位置,均不能使KM线圈获电。这样可避免电动机直接起动,突然快速运转,产生不良影响。
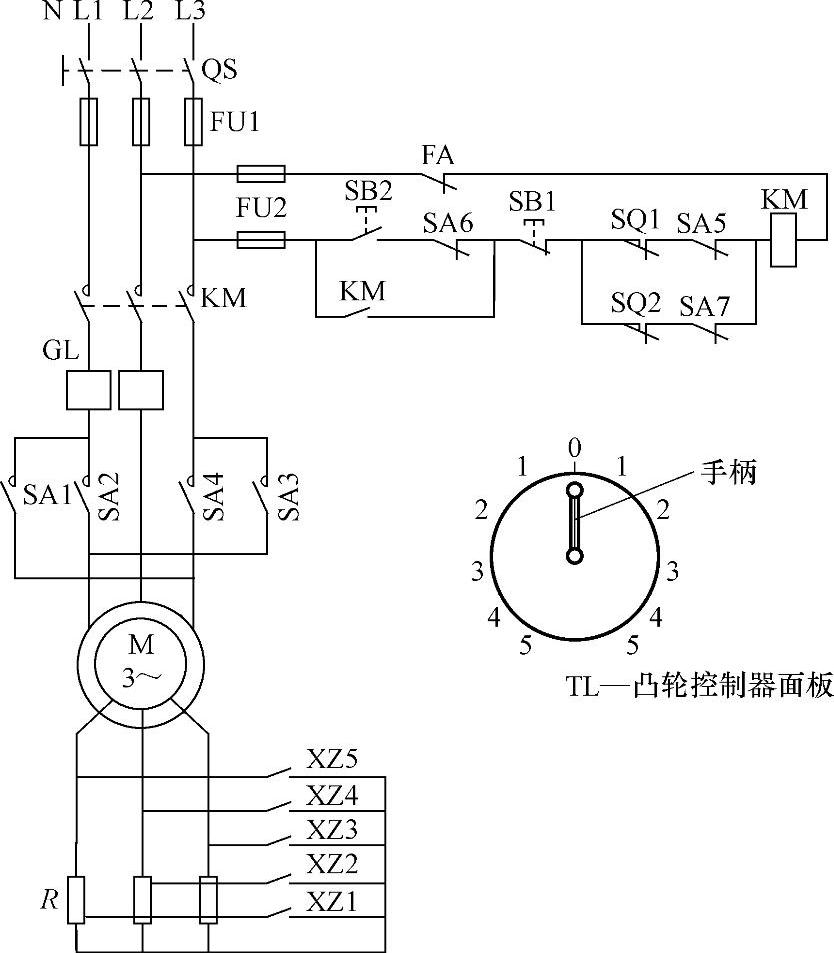
图3-50 绕线转子异步电动机用凸轮控制器的控制电路
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。