



1.电动机单向起动反接制动控制电路(一)
电动机旋转磁场的旋转方向与电流相序一致,因此只要改变电动机三相电源的相序并串入反接制动电阻,就可以达到尽快使电动机停止运行的目的。反接制动是利用改变电动机电源电压相序,使电动机迅速停止转动的一种电气制动方法。由于电源相序改变,定子绕组产生的旋转磁场方向也发生改变,即产生与原方向相反的电磁转矩。
当电动机接入反接制动,因电动机转子仍按原定子绕组产生的旋转磁场方向惯性旋转,而定子绕组产生的旋转磁场方向发生改变后,在电动机转子电路中产生与原方向相反的感应电流,根据载流导体在磁场中受力的原理可知,此时电动机转子要受到一个与原转动方向相反的力矩的作用,从而使电动机转速迅速下降,实现制动。反接制动控制电路应在电动机转速接近零时,能自动地立即将电源切断,以免电动机反向起动。通常采用按转速原则进行制动控制,采用速度继电器检测电动机在反接制动过程中电动机速度变化,当电动机速度接近零速时(100r/min),由速度继电器自动切断接入电动机定子绕组的电源。
反接制动的优点是制动效果好,其缺点是能量损耗大,由电网供给的电能和拖动系统的机械能全部都转化为电动机转子的热损耗。在反接制动开始时,电动机转子与定子旋转磁场的相对速度接近于2倍同步转速,所以定子绕组中的反接制动电流相当于全压直接起动时电流的2倍。为避免反接制动对电动机及机械传动系统的过大冲击,延长其使用寿命,一般在额定容量为10kW以上电动机的定子绕组中,串接对称电阻或不对称电阻,以限制反接制动转矩和制动电流,这个电阻称为反接制动电阻。反接制动电阻可三相均衡串接,也可两相串接,两相串接的电阻值应为三相串接的1.5倍。

图2-8 单向起动反接制动控制电路(一)
单向起动反接制动控制电路(一)如图2-8所示。此电路采用速度继电器来检测电动机转速的变化。在120~3000r/min范围内,速度继电器的常开触头动作,当转速低于100r/min时,其常开触头复位。
在图2-8所示电路图中,KM1为单向运行接触器,KM2为反接制动接触器,KS为速度继电器,R为反接电阻。
起动时按下按钮SB2,KM1通电并自锁,电动机运转,当转速上升到120r/min以上时,速度继电器KS的动合触头闭合,为反接制动作准备。当按下停止复合按钮SB1时,SB1常闭触头先断开,KM1断电,电动机脱离电源,靠惯性继续高速旋转,KS常开触头仍闭合。当SB1常开触头闭合后,KM2通电并自锁,电动机串接电阻接反相序电源。电动机进入反接制动状态,转速迅速下降。当电动机转速降到低于100r/min时,速度继电器KS的常开触头复位,KM2断电,反接制动结束。电动机脱离电源后自然停车。
速度继电器的调整方法是,手持测速仪,对准电动机输出轴,测量电动机输出转速,此时按下按钮SB1,使制动控制电路工作,当电动机转速由额定转速向下降时,降至100r/min观察速度继电器常开触头,看是否分断,若不分断将螺钉向外拧,使反力弹簧力量减小,若分断过早,则将调整螺钉向内拧,使反力弹簧力量增大,如此反复多次,使电动机转速在100r/min左右时,速度继电器触头分断。
2.电动机单向起动反接制动控制电路(二)
电动机单向反接制动的控制电路(二)如图2-9所示。电动机若在正方向运行时,如果把电源反接,电动机转速将由正转急速下降到零。如果反接电源不及时切除,则电动机又要从零速反向起动运行。所以必须在电动机制动到零速时,将反接电源切断,电动机才能真正停下来。单向反接制动的控制电路是用速度继电器来检测电动机的转速。速度继电器与电动机转子是同轴连接在一起的,当电动机旋转时,速度继电器的常开触头闭合,电动机停止时常开触头打开。
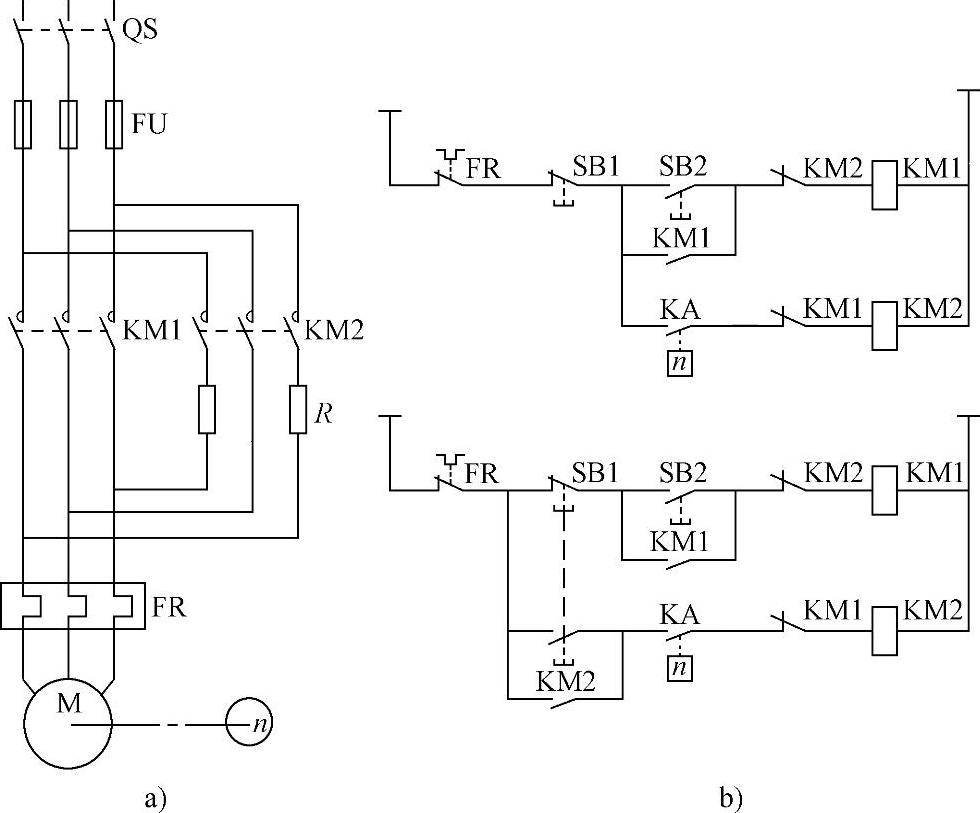
图2-9 单向起动反接制动控制电路(二)
图2-9a所示的反接制动控制电路的工作过程是:按下按钮SB2,接触器KM1线圈得电,接触器KM1主触头闭合,辅助常开触头自锁,而KM1辅助常闭触头分断,电动机正转运行。随着电动机转速的升高,速度继电器KA的常开触头闭合。
按下按钮SB1,接触器KM1线圈失电,接触器KM1主触头分断电动机电源,KM1辅助常开触头的自锁解除,KM1辅助常闭触头复位,接触器KM2线圈得电,接触器KM2主触头闭合,电动机电源相序反接,电动机制动过程开始,电动机的转速迅速下降,当电动机转速下降接近0时,速度继电器KA动合触头复位,接触器KM2线圈失电,接触器主触头分断电动机反接电源,制动过程结束。
图2-9a所示的控制电路存在的问题是,在电动机停车时,若需用手转动电动机主轴调整时,速度继电器将随着电动机转子转动,其常开触头将闭合,接触器KM2线圈得电而使电动机接通电源发生制动作用,使调整工作不能进行。经改进的控制电路如图2-9b所示。控制电路中的停止按钮使用了复合按钮SB1,并在其常开触头上并联了KM2的辅助常开触头,使KM2自锁。这样在用手转动电动机时,虽然KA的常开触头闭合,但只要不按停止按钮SB1,接触器KM2线圈就不会得电,只有在操作停止按钮SB1时,接触器KM2线圈才能得电,反接制动电路才能工作。
图2-9b所示电路的工作原理:按下起动按钮SB2,接触器KM1线圈得电,接触器KM1主触头闭合,辅助常开触头自锁,电动机起动运行。速度继电器KA的常开触头闭合,为反接制动接触器KM2线圈通电准备了条件。
停车时,按下停止按钮SB1,接触器KM1线圈失电,接触器KM1主触头分断电动机三相电源。此时电动机的惯性转速仍然很高,KA的常开触头仍闭合,接触器KM2线圈得电,主触头闭合,将改变相序的电源接入电动机定子绕组,电动机进入串接制动电阻R的反接制动状态。当电动机转子的转速接近零速(100r/min)时,速度继电器KA的常开触头复位,接触器KM2线圈失电,接触器KM2主触头分断电动机定子绕组电源,反接制动过程结束。(https://www.xing528.com)
3.电动机单向起动反接制动控制电路(三)
电动机单向起动反接制动控制电路(三)如图2-10所示。起动时,闭合电源开关QS,按起动按钮SB2,接触器KM1得电闭合并自锁,电动机起动运转。当电动机转速升高到一定值时(如100r/min),速度继电器KS的常开触头闭合,为反接制动做好准备。
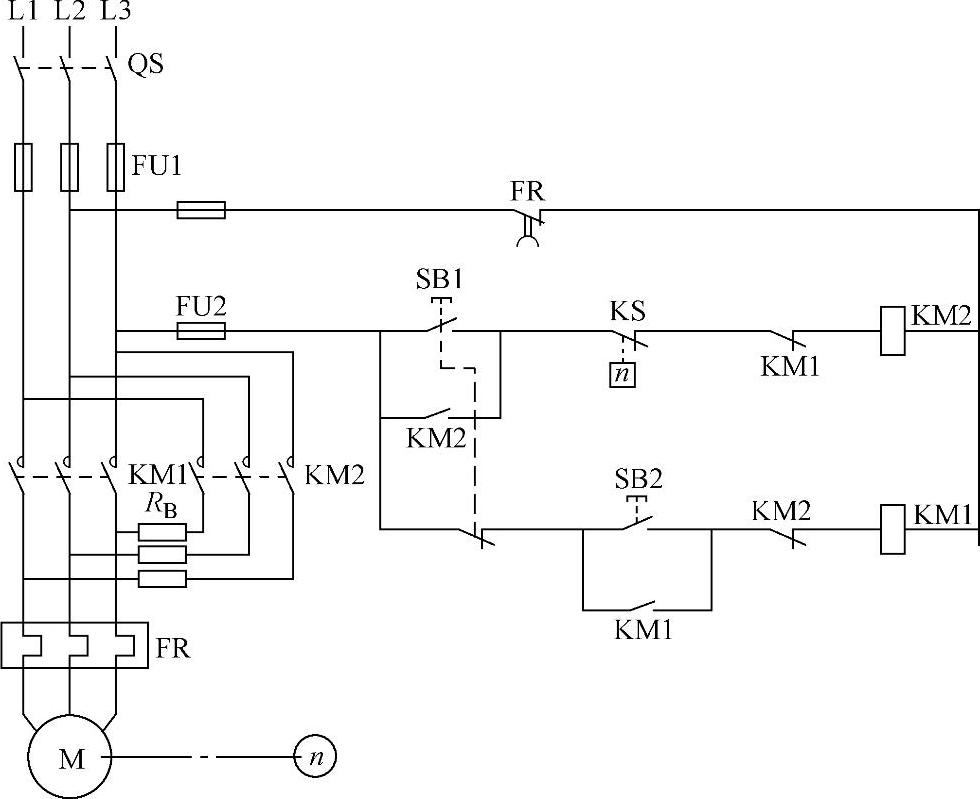
图2-10 单向起动反接制动控制电路(三)
停止时,按停止按钮SB1(一定要按到底),按钮SB1常闭触头断开,接触器KM1失电释放,而按钮SB1的常开触头闭合,使接触器KM2得电吸合并自锁,KM2主触头闭合,串入电阻RB进行反接制动,电动机产生一个反向电磁转矩,即制动转矩,迫使电动机转速迅速下降。当电动机转速降至约100r/min以下时,速度继电器KS常开触头断开,接触器KM2线圈断电释放,电动机断电,防止了反向起动。
由于反接制动时,转子与定子旋转磁场的相对速度接近两倍的同步转速,故反接制动时,转子的感应电流很大,定子绕组的电流也随之很大,相当于全压直接起动时电流的两倍。为此,一般在4.5kW以上的电动机采用反接制动时,应在主电路中串接一定的电阻器,以限制反接制动电流,这个电阻称为反接制动电阻,用RB表示,反接制动电阻器有三相对称和两相不对称两种联结方法,图2-10所示电路为对称接法,如某一相不串接电阻器,则为二相不对称接法。
串接的制动电阻RB的阻值可用下式计算
RB=K×UΦ/Ist (2-1)
式中 RB——反接制动电阻器的阻值(Ω);
UΦ——电动机绕组的相电压(V);
Ist——电动机全压起动电流(A);
K——系数,如果要求反接制动的最大电流等于全压起动电流,K取0.13;如果要
求反接制动最大电流为全压起动电流的一半,K取1.5。
若在反接制动时,仅在两相的定子绕组中串接制动电阻,则选用的制动电阻的数值应是上式计算值的1.5倍。不频繁起动时,反接制动电阻的功率按下式计算
PR=(1/4)In2RB (2-2)
式中 In——电动机额定电流(A)。
频繁起动时,反接制动电阻的功率按下式计算
PR=(1/3~1/2)In2RB (2-3)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。