



按位置原则控制电动机运行,是生产机械电气化中应用最多和作用原理最简单的一种形式,在采用位置控制的电气自动装置电路中,由行程开关或终端开关的动作发出信号来控制电动机的工作状态。若在预定的位置电动机需要停止,则将行程开关的常闭触头串接在相应的控制电路中,这样在机械装置运动到预定位置时行程开关动作,常闭触头断开相应的控制电路,电动机停转,机械运动也停止。
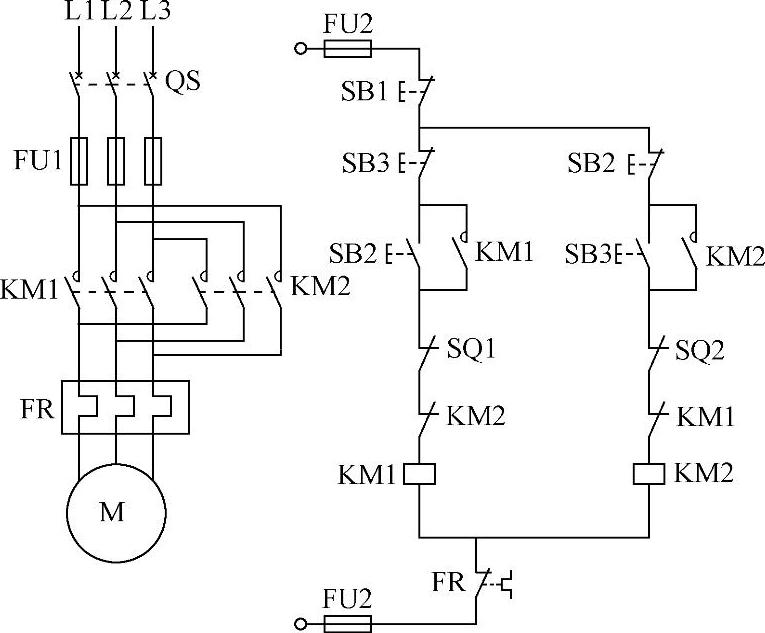
图1-34 电动机可逆带限位控制电路
电动机可逆带限位控制电路是一种带有位置保护的控制电路如图1-34所示。这种电路多用在具有往返于机械运动的设备上,为了防止设备在运动时超出运动位置极限,在极限位置装有限位开关SQ使之能够停止。图1-34所示电路工作过程如下:
1)正向运动:合上断路器QF,接通三相电源,按下正向起动按钮SB2,KM1通电吸合并自锁,主触头闭合接通电动机,电动机这时的相序是L1、L2、L3,即正向运行。如果运动到了极限位置,将碰到限位开关SQ1,SQ1的常闭断开,KM1失电不再吸合,主触头断开电动机停止。
2)反向运动:合上断路器QF,接通三相电源,按下反向起动按钮SB3,KM2通电吸合并通过辅助触头自锁,常开主触头闭合换接了电动机三相的电源相序,这时电动机的相序是L3、L2、L1,即反向运行。如果运动到了极限位置,将碰到限位开关SQ2,SQ2的常闭断开,KM2失电不再吸合,主触头断开电动机停止。(https://www.xing528.com)
3)互锁环节:互锁环节具有在电路中起安全保护作用,图1-34所示电路的互锁环节有:
①接触器互锁:KM1线圈回路串入KM2的常闭辅助触头,KM2线圈回路串入KM1的常闭触头。当正转接触器KM1线圈通电动作后,KM1的辅助常闭触头断开了KM2线圈回路,若使KM1得电吸合,必须先使KM2断电释放,其辅助常闭触头复位,这就防止了KM1、KM2同时吸合造成相间短路,这一电路环节称为互锁环节。
②按钮互锁:在电路中采用了控制按钮操作的正反转控制电路,按钮SB2、SB3都具有一对常开触头,一对常闭触头,这两个触头分别与KM1、KM2线圈回路连接。例如按钮SB2的常闭触头与接触器KM2线圈串联,而常开触头与接触器KM1线圈回路串联。按钮SB3的常闭触头与接触器KM1线圈串联,而常开触头与KM2线圈回路串联。这样当按下SB2时只能有接触器KM1的线圈可以通电而KM2断电,按下SB3时只能有接触器KM2的线圈可以通电而KM1断电,如果同时按下SB2和SB3则两只接触器线圈都不能通电。这样就起到了互锁的作用。
4)停止:正常停止需按下按钮SB1,SB1的常闭接点断开,控制回路失电接触器不再吸合,电动机停止运行。
紧急停止,紧急停止是设备在运动过程中,运动到了位置极限碰到限位开关SQ1(SQ2)所造成的停止,这时只要起动反方向控制,即可使设备重新运行。电动机的过载保护由热继电器FR完成。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。