



观测器的设计主要有:被控对象建模、传感器建模和观测补偿器设计。本节结合伺服控制系统,具体地给出其中每一部分。
1.被控对象建模
通常被控对象具有如下形式:

式中 K——比例增益;
N——积分阶次;
GLPF(S)——被控对象滤波作用的传递函数。
在伺服系统中,被控对象增益K是KT/J,KT是电动机转矩常数,J是电动机与负载的总转动惯量。负载转动惯量可能比电动机转动惯量大很多倍,在设计观测器时,总的被控对象增益实际上可能是未知的。标称增益通常必须通过实验来确定。对于增益变动的问题,属于另外一个内容,在正常情况下,如果变化大于20%,观测器的优势就很难实现。
电流乘以增益K,获得电动机的加速度,加速度积分一次,获得电动机速度,伺服系统具有一阶积分,即N=1。
伺服电动机的滤波作用存在于黏性阻尼和绕组间的电容。黏性阻尼对低于几赫的信号具有轻微的镇定作用,由于它在系统中几乎不起什么作用,通常被忽略。与绕组相连接的寄生电容具有重要的作用,但对控制系统的直接作用通常几乎没有,因为这种作用的频率范围远高于伺服控制器的带宽,因此通常也被忽略。
2.传感器建模(https://www.xing528.com)
建模的任务是必须确定传感器的传递函数,其关键参数是滤波参数和比例参数。伺服系统用增量编码器作为传感器,其传递函数为一阶积分,因此传感器建模就变成了一件微不足道的事情, =GS(s)。如果传感器是旋转变压器与正弦编码器,模型需要增加包括反馈信号变换引起的相位滞后,它通常取决于旋转变压器恢复位置信息所采用的方法。本节为方便说明,使用的估计传感器模型是以增量型传感器模型为基础建模的。
=GS(s)。如果传感器是旋转变压器与正弦编码器,模型需要增加包括反馈信号变换引起的相位滞后,它通常取决于旋转变压器恢复位置信息所采用的方法。本节为方便说明,使用的估计传感器模型是以增量型传感器模型为基础建模的。
3.观测补偿器设计
观测补偿器设计就是选择补偿器中的增益的过程,它可归结为是P、I、D增益的不同组合。采用补偿器的目的是以足够的稳定裕度使观测器误差趋于零。任何用于镇定传统控制回路的方法都适合于观测器回路。在通常的伺服控制系统中,PID补偿器也许是可利用的最简单的一种补偿器。在设计补偿器时,PID补偿器已经足够了。
在 的设计中,可以忽略饱和问题。控制器的PID设计要考虑到饱和问题,然而通常这个问题与观测器无关。由于它们跟随实际的被控对象,所以一般不受需要饱和限制条件的支配。因此,PID补偿器通常是不要求饱和限制的。
的设计中,可以忽略饱和问题。控制器的PID设计要考虑到饱和问题,然而通常这个问题与观测器无关。由于它们跟随实际的被控对象,所以一般不受需要饱和限制条件的支配。因此,PID补偿器通常是不要求饱和限制的。
4.小结
图10-8是用于消除由简单差分引入的相位滞后的Luenberger观测器结构。在实体系统中,传感器使用增量型编码器,反馈电流IF乘以KT产生电磁转矩Te,而IF乘以 产生电磁转矩的估计值
产生电磁转矩的估计值 。电磁转矩由电动机绕组产生,它同扰动转矩TD相加,形成总转矩。总转矩除以转动惯量J,获得电动机加速度,加速度积分获得速度vM,再一次积分,获得位置PM。后一个积分被看做传感器的一部分,对于一个增量型编码器,反馈没有相位滞后,这种形式是合理的。观测器以数字形式实现,在模型系统中,积分1/S用数字等效形式Tz/(z-1)取代,因而模型系统与实体系统是相似的。
。电磁转矩由电动机绕组产生,它同扰动转矩TD相加,形成总转矩。总转矩除以转动惯量J,获得电动机加速度,加速度积分获得速度vM,再一次积分,获得位置PM。后一个积分被看做传感器的一部分,对于一个增量型编码器,反馈没有相位滞后,这种形式是合理的。观测器以数字形式实现,在模型系统中,积分1/S用数字等效形式Tz/(z-1)取代,因而模型系统与实体系统是相似的。
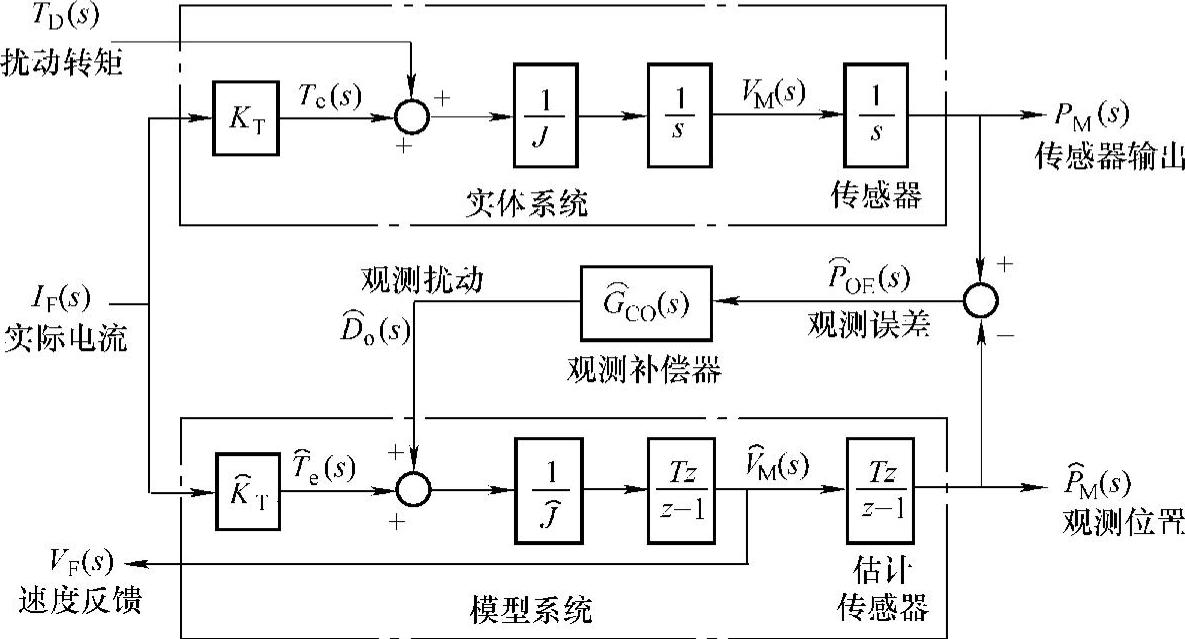
图10-8 Luenberger观测器结构
模型系统与实体系统的第二个积分都被看作传感器的一部分,而不是电动机的一部分。由于关心的是速度,因此观测器中观测速度(VM是被控对象的输出反馈VF,在这种情况下,观测器的目的是消除简单差分所带来的相位滞后。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。