



Luenberger观测器可以通过把它的结构表示成传递函数来分析,传递函数结构能够表征观测器的详细运行情况,有利于观测器的调试。
从图10-6可以看出,观测器传递函数有两个输入Pc(S)和Y(S),以及一个输出 。在分析中,把实际模型和传感器看作一个黑箱子,重点在于对观测器的输入与输出之间关系的理解,忽略观测器内部
。在分析中,把实际模型和传感器看作一个黑箱子,重点在于对观测器的输入与输出之间关系的理解,忽略观测器内部 和
和 。事实上,由于框图缩减为一个简单函数,这些信号是接触不到的。用Mason信号流图法建立观测器的传递函数,得到
。事实上,由于框图缩减为一个简单函数,这些信号是接触不到的。用Mason信号流图法建立观测器的传递函数,得到

式(10-3)是两个因式之和,把这两个因式完全分离开,有
式(10-4)中第一个因式取决于传感器输出Y(s),改写后,得

式(10-5)可以看做是系统输出乘以估计传感器逆的传递函数,然后由右边的一项滤波。由后面分析可知,右边的这一项是一个低通滤波器。因此,式(10-5)是图10-4中给出的形式后接了一个低通滤波器。
式(10-4)中,第二个因式取决于功率变换器输出Pc(S),改写后,得

在式(10-6)里面,估计的被控对象传递函数 被抽出来成为滤波器项的比例系数,比例系数项等效于图10-5中用来计算
被抽出来成为滤波器项的比例系数,比例系数项等效于图10-5中用来计算 的形式。由后面分析可知,右边的这一项是一个高通滤波器。因此,式(10-6)是图10-5中给出的形式后接了一个高通滤波器。(https://www.xing528.com)
的形式。由后面分析可知,右边的这一项是一个高通滤波器。因此,式(10-6)是图10-5中给出的形式后接了一个高通滤波器。(https://www.xing528.com)
下面来分析上面提到的这个低通滤波器和这个高通滤波器。式(10-5)中右边一项可以看作一个低通滤波器:

下面对式(10-7)中每一项进行分析: 是被控对象模型,控制系统的被控对象通常至少会有个积分器,在高频段,这一项的幅值会衰减到接近零。
是被控对象模型,控制系统的被控对象通常至少会有个积分器,在高频段,这一项的幅值会衰减到接近零。 是传感器模型,通常大多数传感器都包含低通滤波器,因此在高频段,这一项总是衰减的。
是传感器模型,通常大多数传感器都包含低通滤波器,因此在高频段,这一项总是衰减的。 是构建的,会满足
是构建的,会满足 的开环增益在观测器穿越频率处将有足够大的相位裕度。同实际控制回路一样,补偿器
的开环增益在观测器穿越频率处将有足够大的相位裕度。同实际控制回路一样,补偿器 具有足够高的微分阶次,以避免开环增益较高时出现的180°相位偏移,但是微分阶次又必须足够低,以满足增益在高频段衰减到零。因此,计算所得三项乘积在高频段数值小。在高频段幅值下降到很小,式中1在分母中占主导地位,于是,式(10-7)就被简化为它的分子,即幅值很小,接近为零。在低频段,
具有足够高的微分阶次,以避免开环增益较高时出现的180°相位偏移,但是微分阶次又必须足够低,以满足增益在高频段衰减到零。因此,计算所得三项乘积在高频段数值小。在高频段幅值下降到很小,式中1在分母中占主导地位,于是,式(10-7)就被简化为它的分子,即幅值很小,接近为零。在低频段, 有一阶积分,这一项具有大的幅值。
有一阶积分,这一项具有大的幅值。 是一个在低频段幅值为1的低通滤波器。
是一个在低频段幅值为1的低通滤波器。 将增加一阶积分,或至少会有一个比例项。计算所得三项乘积在低频段幅值大。在低频段幅值大,式中1在分母中可忽略,于是,式(10-7)就被简化为1。低频段的增益为1,高频段的增益接近零,这两个特征是低通滤波器的表征。
将增加一阶积分,或至少会有一个比例项。计算所得三项乘积在低频段幅值大。在低频段幅值大,式中1在分母中可忽略,于是,式(10-7)就被简化为1。低频段的增益为1,高频段的增益接近零,这两个特征是低通滤波器的表征。
式(10-6)中右边一项可以看做一个高通滤波器,即

用类似推理得到,式(10-8)在高频段,分母衰减到接近1,使得式子简化为1。在低频段,分母非常大,使得这一项非常小。这种特性是高通滤波器的表征。
最后,把式(10-5)和式(10-6)合并起来,以框图的形式给出Luenberger观测器的滤波器形式,如图10-7所示。图中展示了观测器如何将输入Y(S)、Pc(S)相结合,产生观测状态 的。Y(S)提供了良好的低频信息,但对噪声敏感,因此,在这一项后面接一个低通滤波器。Pc(S)项提供的低频信息很差,因为积分增益即便只有轻微的偏差也会受影响而产生漂移。另一方面,这一项不像Y(S)项那样容易产生高频噪声,因为被控对象正常情况下至少含有一个积分项,其作用如同滤波器,消除了通常存在于功率变换器输出中的噪声成分。因此,这样的一项后面因该跟随一个高通滤波器。
的。Y(S)提供了良好的低频信息,但对噪声敏感,因此,在这一项后面接一个低通滤波器。Pc(S)项提供的低频信息很差,因为积分增益即便只有轻微的偏差也会受影响而产生漂移。另一方面,这一项不像Y(S)项那样容易产生高频噪声,因为被控对象正常情况下至少含有一个积分项,其作用如同滤波器,消除了通常存在于功率变换器输出中的噪声成分。因此,这样的一项后面因该跟随一个高通滤波器。
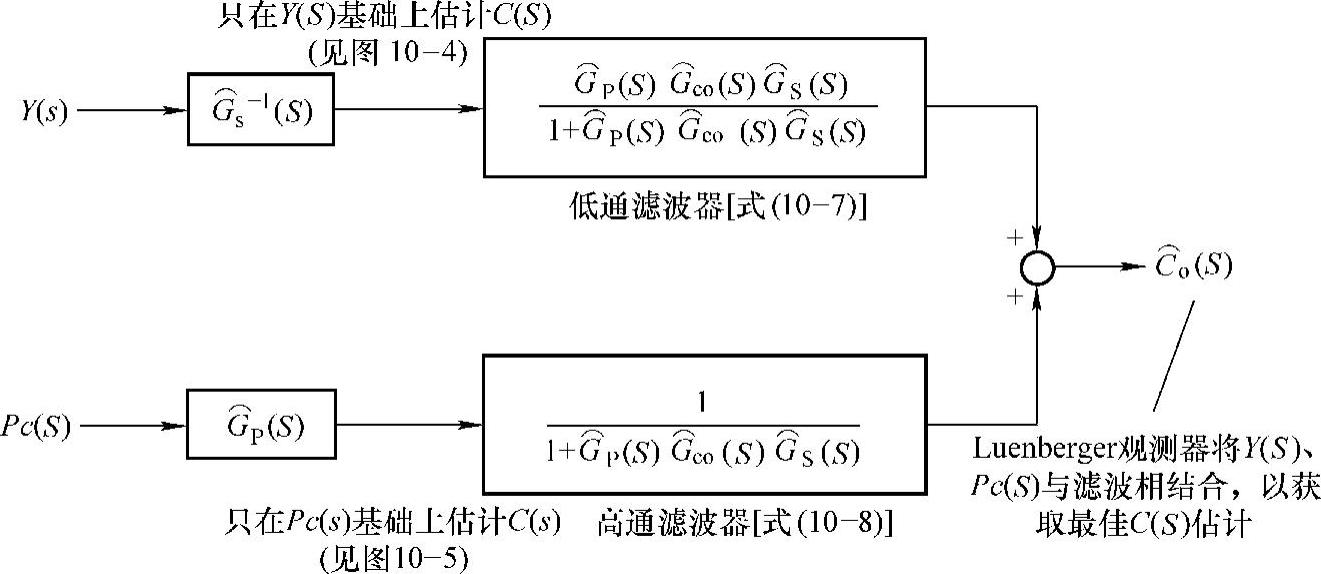
图10-7 Luenberger观测器的滤波器形式
Luenberger观测器用两种不同的方式从不同的两个信号源形成观测状态,并采用滤波将各自滤波器的最佳频率范围组合成一个输出。因此,观测器对 、
、 、
、 调试的过程就变成了构造滤波器的过程,对于设计者来说,这样的过程会是比较熟悉的。
调试的过程就变成了构造滤波器的过程,对于设计者来说,这样的过程会是比较熟悉的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。