



在伺服控制系统中,观测器原理是通过综合测得的反馈信号和控制系统对象的知识,使得其能更准确地认知被控对象的特征。如图10-1所示。观测器增扩了传感器的输出,并给控制律提供了反馈信号。
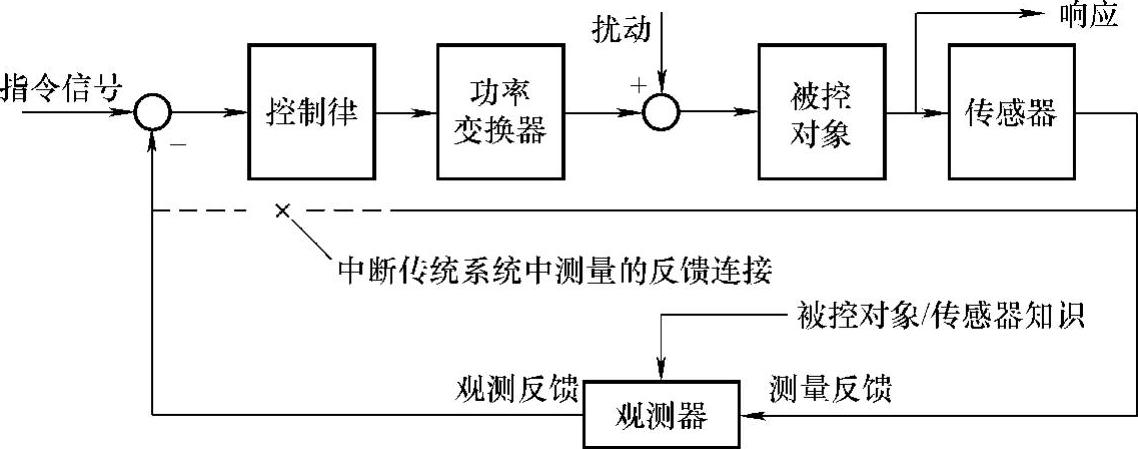
图10-1 观测器在控制系统中的作用
由图10-1能够看出,观测器代替了传统系统中的测量反馈。观测器依靠被控对象和传感器知识建立自己的模型,因而测量反馈和相关被控对象/传感器状态量是其输入,由观测器观测得到观测信号,观测信号中相关信息可作为反馈信号与系统连接。在极端情况下,观测器可以完全撤除传感器,只由被控对象的状态提供输入。
观测器内部形式有多种,Luenberger观测器是观测器最为实用的形式之一。如图10-2所示,它由以下5个单元组成:传感器输出Y(s);功率变流器输出Pc(s);估计被控对象模型 ;估计传感器模型
;估计传感器模型 ;PI或者PID结构的观测补偿器
;PI或者PID结构的观测补偿器 。
。
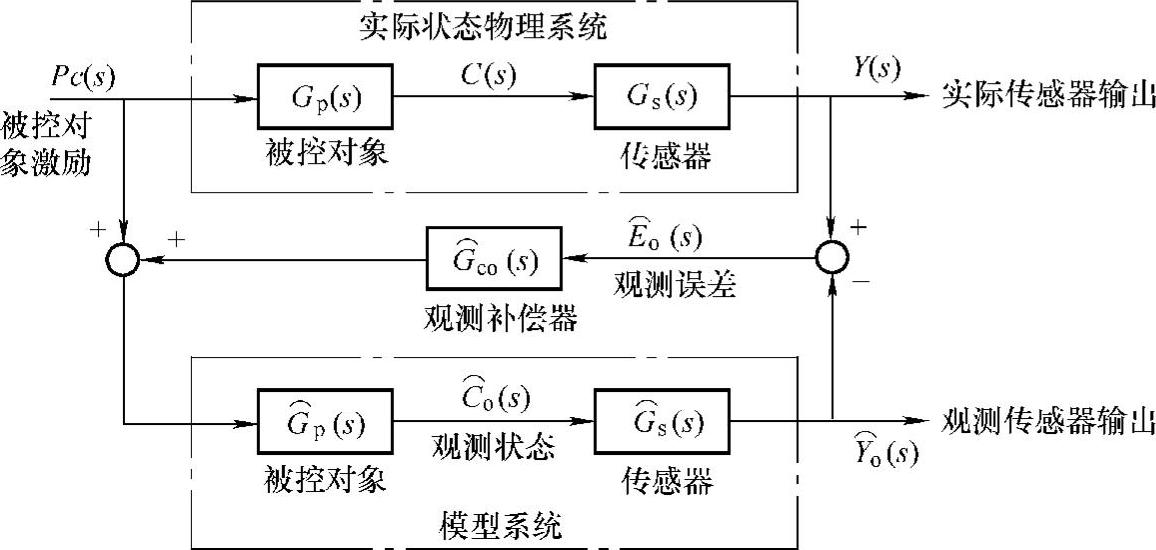
图10-2 Luenberger观测器一般形式(https://www.xing528.com)
Luenberger观测器形式中,观测模型及其参数都称为估计,估计用于描述系统模型中的部件,它与实际系统状态是不同的,为了表示区别,在符号头顶用^做标记。例如被控对象的传递函数为Gp(s),转动惯量J是其中一个参数;估计被控对象的传递函数为 。转动惯量
。转动惯量 是其中一个估计参数。观测用于由观测器导出的信号,因此状态
是其中一个估计参数。观测用于由观测器导出的信号,因此状态 、误差
、误差 和传感器输出
和传感器输出 是观测的。观测信号
是观测的。观测信号 或
或 都可以作为反馈信号与系统连接。
都可以作为反馈信号与系统连接。
由图10-2可以看出,Luenberger观测器内部形式是较为复杂的,能够采用它带来系统性能的提升或许需要一些因素的存在。当系统存在以下因素时,能从Luenberger观测器中获益,这些因素存在得越多,观测器对系统性能的改善就越显著。
第一个因素是有高性能的要求。系统要求对指令信号的改变能做出快速响应,以及具有抗扰动响应能力。两者受益于观测器;对于响应能力不存在问题的系统,则没有理由采用观测器。
第二个因素是计算资源的可利用性。观测器几乎都依赖于数字控制器。如果控制系统是在高速处理器(如DSP)上执行的,其计算资源足以实现观测器,则认为具有可利用的资源;添加一个观测器,不会明显增加费用负担。但是,若系统采用的是简单的模拟控制器,那么设计支持观测器的硬件结构将需要付出更大的努力。
第三个因素是有采用高分辨率位置反馈信号的可能。当采用高分辨率位置传感器时,观测器才会最有效。位置传感器分辨率噪声通常是伺服控制系统中的一个问题,很难处理,观测器的加入往往加剧了这个问题的不良影响。
另外一个因素是反馈信号中存在相位滞后。旋转变压器信号通常用跟踪回路来处理,在位置信号中产生相当大的相位滞后,它的存在使观测器更可能改善系统的性能。再有,在由位置获得速度的情况下,回路中会产生相位滞后,这种滞后是与反馈传感器无关的。但是,众所周知,这种滞后是由位置通过简单差分获得的,该相位滞后也为观测器改善系统性能提供了机会。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。