



离线自整定是指系统试运行时,对控制装置所进行的调试。离线调试系统的构成如图8-20所示。图中,控制参数计算是在调试指令下,依据受控对象产生的数据进行的一种自整定方法。由此可见,伺服控制系统PID参数整定是一个与受控对象参数辨识密不可分的过程,它们都属于参数自整定的内容。
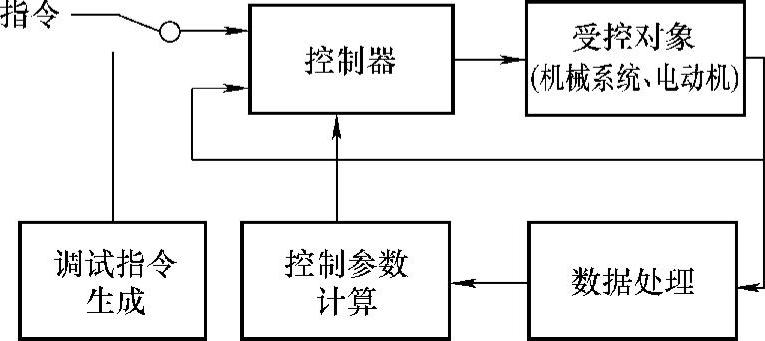
图8-20 离线调试
在伺服系统的各项参数中,负载转动惯量是影响伺服系统控制性能的一个关键参数,通过对转动惯量进行辨识来合理配置初始控制参数,例如转动惯量

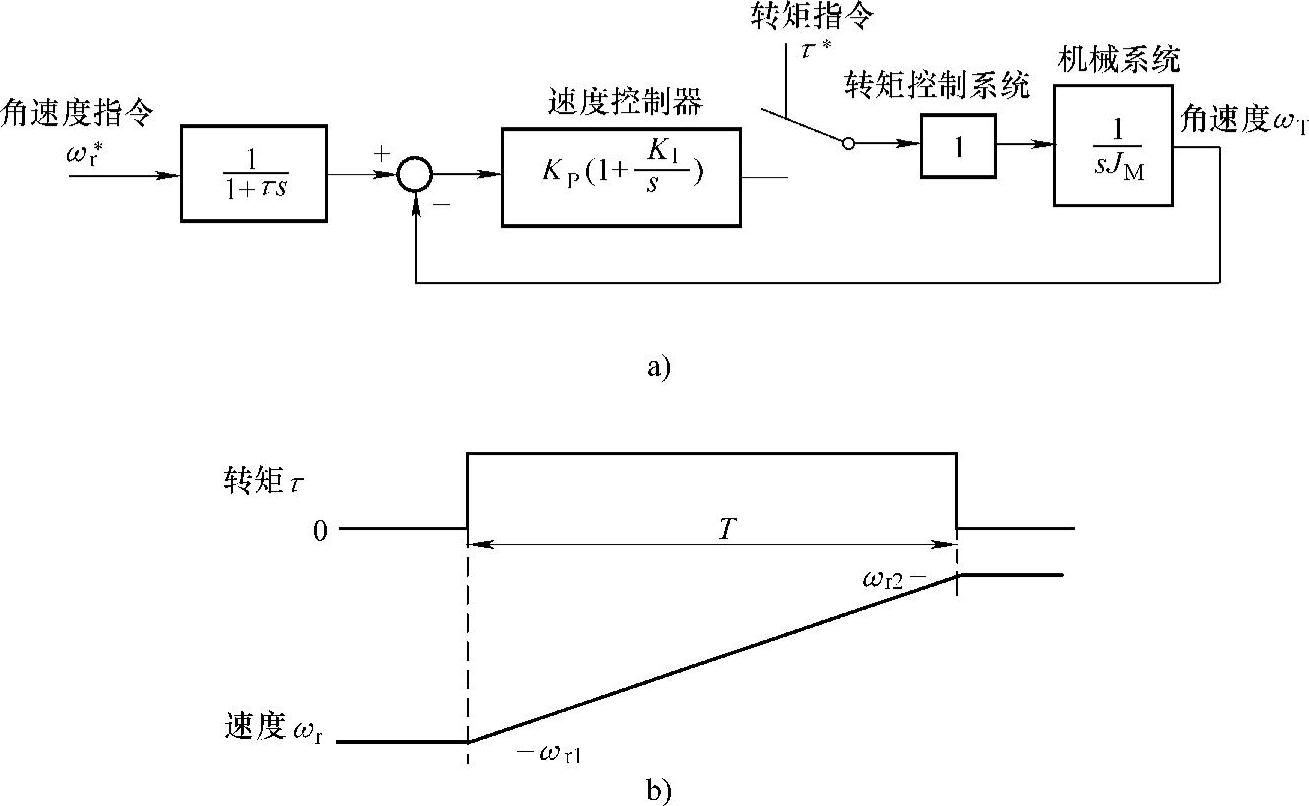
转动惯量的调试原理是很容易理解的,它建立在速度控制器的设计基础上,如图8-21a所示。单惯性机械系统在时间T内以一定的转矩τ驱动,具有如图8-21b所示的直线加速特性。这时转动惯量JM可用下式计算:

 (https://www.xing528.com)
(https://www.xing528.com)
图8-21 转动惯量参数离线自整定的传统方法
a)速度控制系统的构成 b)恒转矩加速时的速度波形
系统自动调试时,只要测定了加速开始与加速结束时的角速度差及转矩,就可以利用式(8-56)计算出转动惯量JM,并把JM代入式(8-55)用来计算出式(8-54)中的Kn。式(8-56)和式(8-54)的计算可以在伺服控制系统的DSP上进行,也可使用其他上位机,例如个人计算机。最后,计算得到速度控制器的PI参数,自动调试结束。
虽然上例中转动惯量参数自整定使用的是与人工调试相似的传统测试方法,但是有的参数会需要采用神经网络算法、模糊逻辑算法等现代测试方法。总之,离线自整定可以整定包括非线性因素在内的大部分参数,这是它的一个特点。
目前,国外许多伺服系统生产厂商均已推出带控制参数自整定功能的伺服产品。FANUC公司为其伺服产品提供自整定软件包——Servo guide,能离线实现系统参数的辨识和控制参数的整定;松下公司也推出了能对转动惯量进行离线辨识并进而对控制参数进行整定的产品;安川公司的∑-V系列伺服驱动器还推出了高级自动调谐功能,它是∑-V伺服驱动器的配套上位机软件中的功能,图8-22给出了高级自动调谐功能的操作界面,通过该功能即可对伺服系统的负载转动惯量进行辨识,进而对伺服系统的各项控制参数进行自整定。
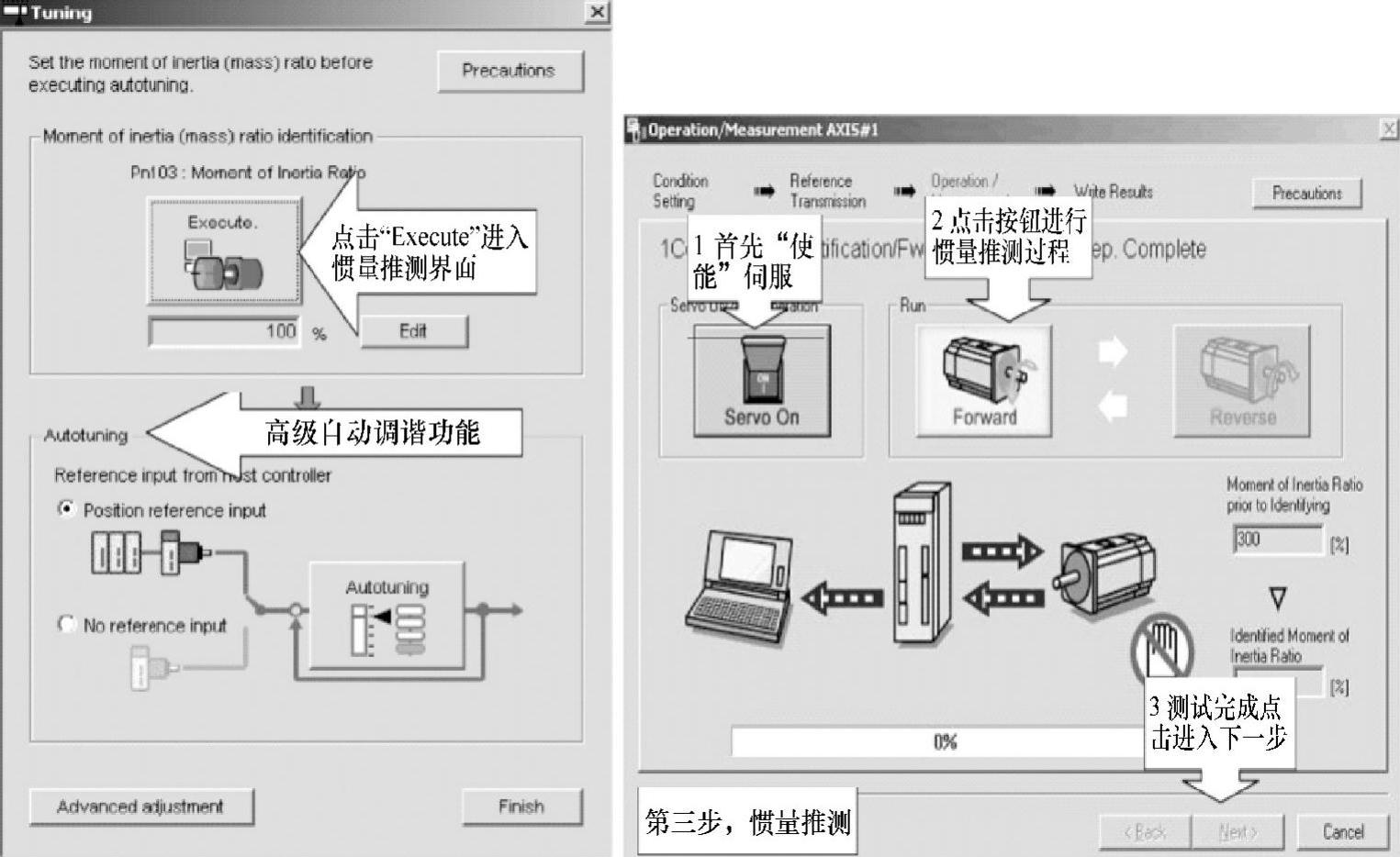
图8-22 安川∑-V伺服驱动器高级自动调谐操作界面
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。