



有时整定出来的参数不能满足系统性能要求,通常都要根据具体情况对控制器参数进行手动调整。这里简单介绍一下手动调整的基本原则,如图8-19a所示。
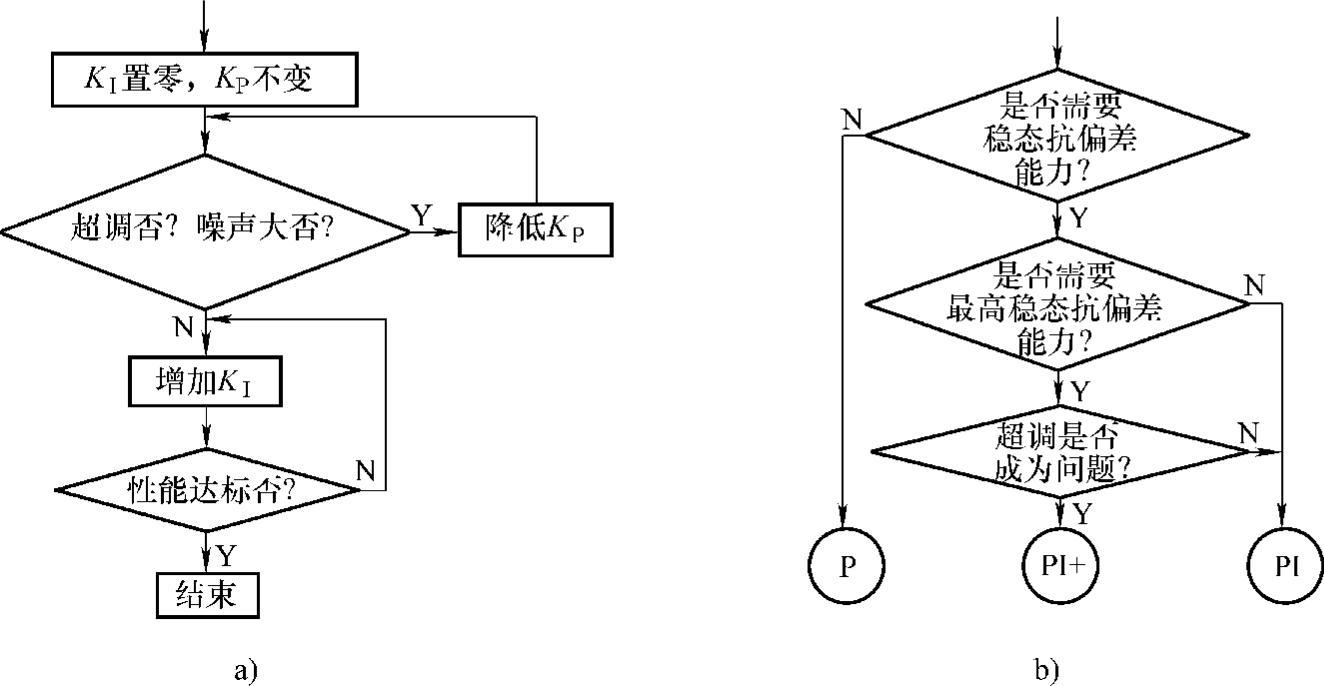
图8-19 控制器手动调整
图8-19a中,手动调整的第一步是把KI置零,如果仅在KP下,系统有较大超调或者噪声太大,这时需要减小KP直至无超调,或者超调较小,无振荡,并且噪声可以接受。接着逐渐缓慢增大KI到初始整定值,在这个过程中,当系统得到满足的控制结果时,停止增加KI。
如果超调成为问题,可以试着改PI控制为PI+控制结构,如图8-19b所示。图8-19b中,检查系统所需要的稳态抗偏差能力,如果没有抗偏差能力要求,则可以撤除积分增益;如果有某种抗偏差能力的要求,则使用标准积分形式,即PI结构;如果要求有最大稳态抗偏差能力,则需要通过采用PI+控制来增加输入滤波器。
通常,伺服控制系统都会工作在速度控制模式或者位置控制模式,结合具体的实际控制模式,会有如下调整经验可供参考:(https://www.xing528.com)
(1)速度控制模式下
在机械系统不产生振动的范围内,速度控制器比例增益越大,响应性越好。在负载惯性动量较大,机械系统内含有振动因素时,需要增大控制器的积分增益,否则机械侧会出现振动;同时,过大的积分增益会引起定位调整时间变长,需要在机械系统振动和调整时间之间做衡量。当使用滚珠丝杠等时,会发生扭转振动,需要在电流环控制器前增大电流指令滤波器时间,消除振动,如果振动声音不大,则尽量减小滤波时间。
(2)位置控制模式下
位置环控制器比例增益越高,则响应越高,定位时间越短。单一的提高位置环增益,容易产生振动,主要体现在位置环输出的某些速度指令产生振动,需要同时考虑提高速度环增益。在位置环增益尽可能高的情况下,适当增加前馈量,使其获得更快的响应,但注意不要出现定位点反复振动、速度超程等情况。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。