



顾名思义,PI+控制就是PI控制的一种改进。由于超调的缘故,PI控制器中的积分增益在量值上受到限制。PI+控制用一个低通滤波器对指令信号进行滤波,以消除超调。用这种方式,积分增益可以提升到更高的值。在抗稳态扰动极为重要的应用场合下,如驱动一个高摩擦阻力机构时,PI+控制非常有用。
PI+控制结构如图8-14所示。它是由PI控制器外加一个指令信号滤波器组成。PI+控制器对指令信号的滤波程度决定于增益KFR,从图可以看出,当KFR为1时,所有的滤波作用都消除了,控制器等同于PI控制器;当KFR为零时,滤波作用最强烈,这种情况下获得的积分增益最高,但是也严重限制了指令的响应性能,这也是PI+控制器的主要缺点,因此,KFR不能过于接近零。
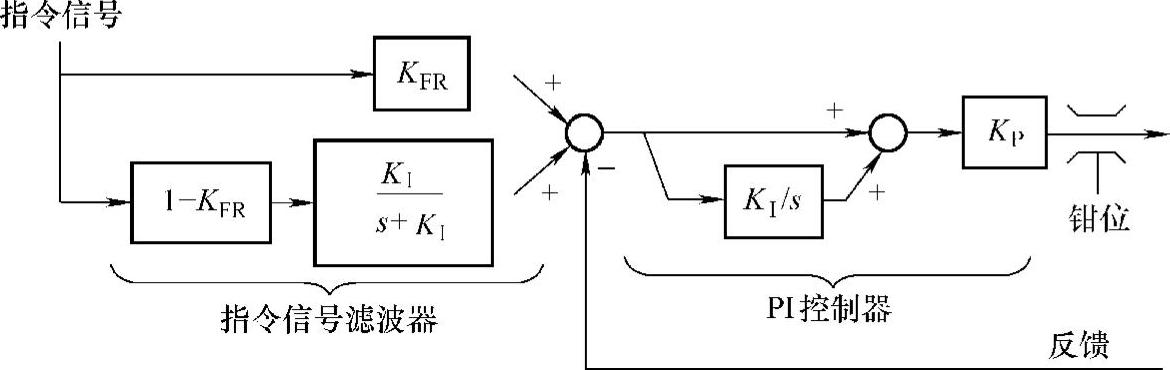
图8-14 PI+控制框图
KFR最优值的确定取决于具体的应用场合,但是在许多应用中,KFR取值为0.65,这个值具有代表性。此外,把KI作为指令信号低通滤波器的转折频率,在削减由PI产生凸峰方面是最优的,同时也方便控制算法的实现。
由图8-14,PI+控制律表达式为
 (https://www.xing528.com)
(https://www.xing528.com)
经过简化后,式(8-37)能够得到:

式(8-38)是PDFF的表达式。PDFF通常又被称为具有前馈的伪微分反馈,它是由Phelan研究的称为伪微分反馈(Pseudo Derivative Feedback,简称PDF)控制法的扩展,如图8-15所示。式(8-38)把图8-14和图8-15等价起来,实际上,PDFF是实现PI+的一种非常有用的备用方法,因为由图8-15中可以明显看到,PDFF在积分前没有乘法。如果不仔细构建,乘法会导致数字噪声,这种噪声在积分之前可以导致控制回路的漂移,就像舍入误差积累在积分器上一样。PDFF在积分前只有一个减法,减法操作通常是无噪声的,因此很容易避免噪声。
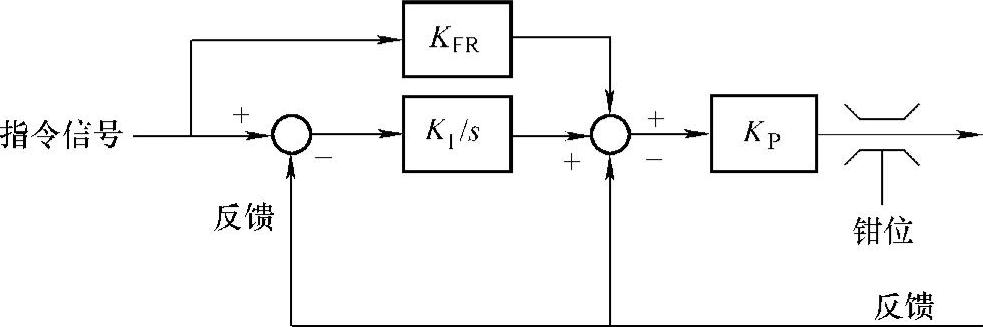
图8-15 PDFF控制框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。