



类似于用扰动解耦来改进扰动响应那样,前馈用来改善指令信号的响应。采用前馈时,指令响应不再取决于控制回路带宽,一个慢速控制器可以将指令响应的速度提高好几倍。由于前馈增益不形成回路,因此不损害系统的稳定性。
一个标准的前馈控制器如图7-23所示,位置环引入了前馈路径GF(s)和KF,把控制回路分成两部分,即控制器GC(s)和被控对象GP(s)。由图7-23,系统的指令响应传递函数可以写为

由于理想指令响应为1,因此式中T(s)=1,根据式(7-47)可得到
(KFGF(s)+GC(s))GP(s)=1+GC(s)GP(s) (7-48)
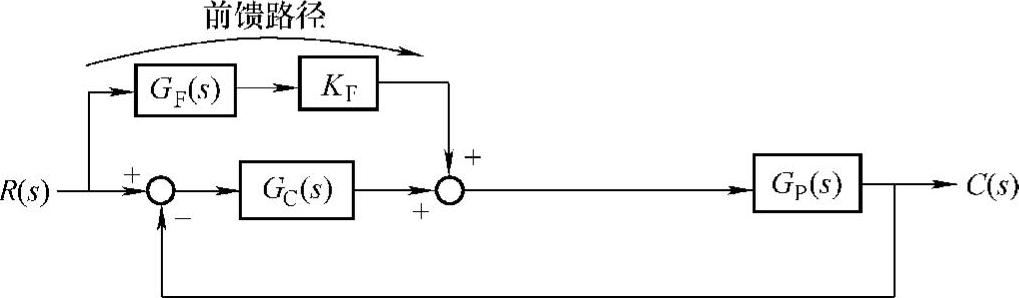
图7-23 前馈控制器的一般结构
经校验可知,如果KF=1,则GF(s)=G-1P(s),这也就是说,确定出控制对象传递函数的逆后,前馈路径使得输出信号完全跟踪指令信号。由式(7-47)也可以得到,前馈传递函数GF(s)的模型只与前馈点后面的部分,即GP(s)有关,和点前面的部分,GC(s)没有关系。
结合上一节内容,位置环控制结构一般如图7-24所示,它由位置控制器APR,转速环(由转速控制器ASR、电流环等环节构成)和一个积分环节(图中最后一个框图)组成。积分环节表示转速到位置的环节,即位置可由转速积分得到。
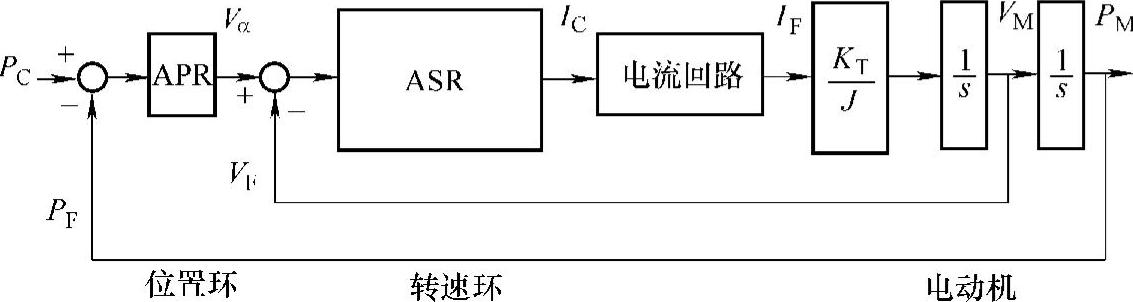
图7-24 位置环控制一般结构
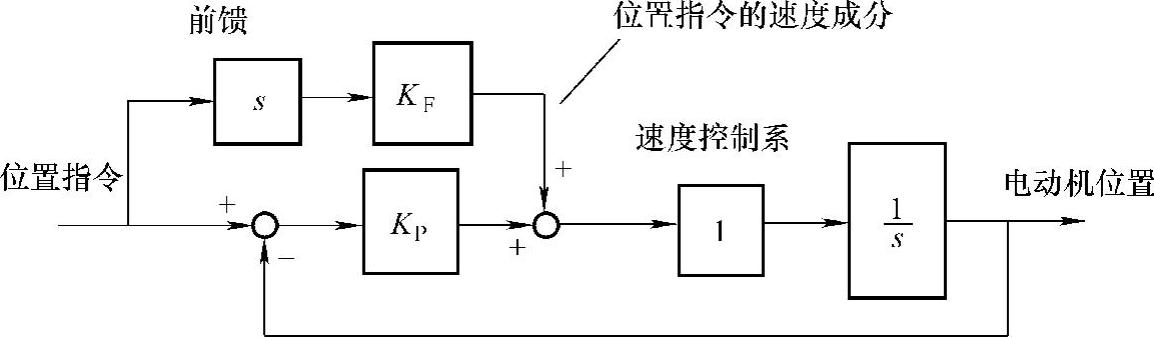
由于转速环具有低通特性,且带宽远宽于位置环,为了简化分析,其传递函数假定为1,由此可以认为图7-23中GP(s)的传递函数近似为1/s,则由理想的指令响应传递函数,式(7-47)得到GF(s)=s。于是,结合图7-23和图7-24可简化结构得到图7-25,图中位置环静态误差为:

假定位置指令R(s)为斜坡指令,即1/s2,则式(7-49)的结果为

同样,得到不带前馈的位置环静态误差为

比较式(7-50)与式(7-51),当KF=100%时,前馈效果最理想,静态误差为零;当KF=0时,静态误差即与不带前馈时的一样。
 (https://www.xing528.com)
(https://www.xing528.com)
图7-25 具有前馈功能的位置环结构
上面分析得到KF=100%时,获得的响应最为理想,但实际应用中,它会对变化剧烈的信号产生过大的超调。这个问题可以通过限制前馈增益KF为60%~80%来解决,这种折中的方法在减小超调中是有效的,但它限制了前馈原本对系统在响应速度方面的改进。出现这样问题的根本原因是对位置环框图中转速回路和反馈回路认识的不足。实际系统中转速回路对控制对象的增益并不总是已知的,电动机转动惯量或负载的变化会改变增益;功率变流器运行也并不总是可预测的,总会存在个体差异;同样,反馈回路存在延迟等。解决这些问题需要通过尽可能地减小对功率变流器和反馈的认识缺陷,并对这些缺陷进行补偿,近似逼近转速回路为“1”,以达到提高前馈增益的目的。
通常,在设计位置环时,工程师比较关注的是前馈点的位置,因为正如前面阐明的那样,前馈路径只与点的后面部分有关,前馈点位置越靠后,后面部分的传递函数越近似为1/s。图7-26是具有速度前馈的P/PI位置控制框图,它把图7-25中转速环的ASR提取出来,与位置环ARP一起分析,就像图7-24那样。一般情况下,在位置控制中,转速环采用PI控制,位置环采用P控制,因而又称这种结构为P/PI控制。(位置环还有另外两种结构,即PI/P和PID,由于没有P/PI应用广泛,故本书不作阐述)。图中用速度指令VC取代了前馈通道中的sPC,是因为在大多数现代控制器中,速度指令并不是由位置指令计算得到的。实际上,为避免计算过程中的数字微分问题,通常是由轮廓发生器对受控速度进行积分来计算位置。
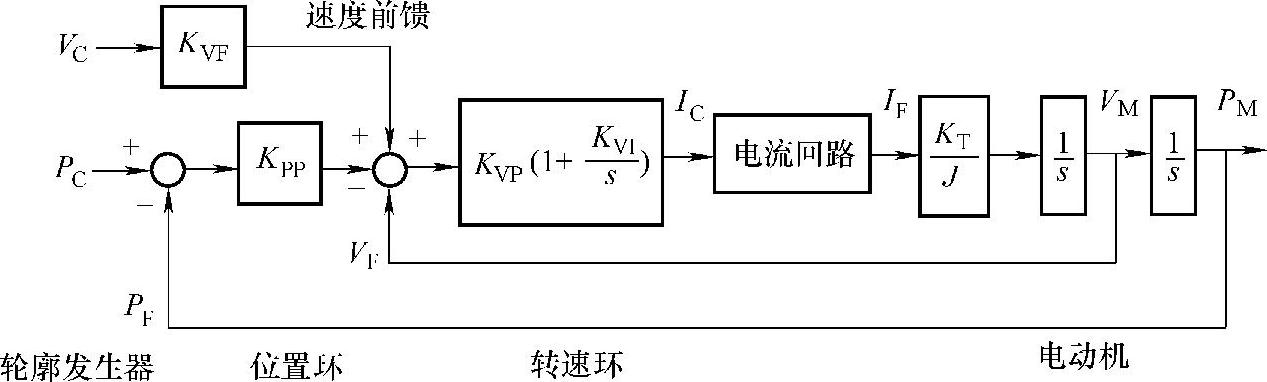
图7-26 具有速度前馈的P/PI位置控制框图
加速度前馈是速度前馈的一个自然扩展,如图7-27所示。与加速度指令信号AC成比例的电流IC加到了速度环的输出。注意到KAF把加速度转换为安培,意旨该项包含一个隐式变换因子J/KT(乘以J把加速度转换为转矩,除以KT把转矩转换为电流)。因此必须设置KAF为J/KT的一部分,每当负载转动惯量发生变化时,就必须调整KAF。
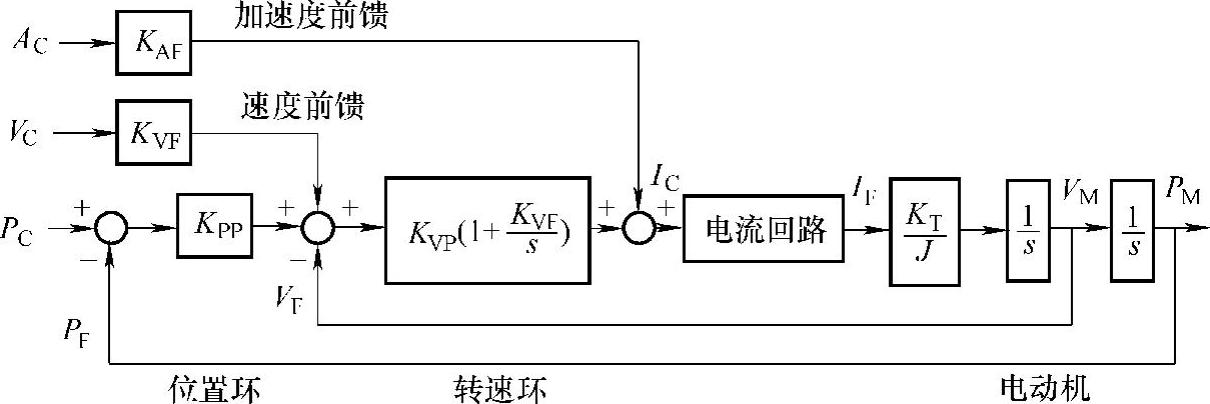
图7-27 具有加速度前馈的P/PI位置控制框图
下面比较P/PI位置环3种控制结构,即图7-24、图7-26和图7-27的指令响应。在无前馈结构下,指令响应传递函数为

式中,在低频段,s很小,函数接近1;在高频段,s很大时,函数值下降到接近零,这种形式是低通滤波器的形式。
在速度前馈结构下,传递函数为

同式(7-52)相比,式(7-53)通过前馈路径在分子中增加了s2项,该项成为分子中的最高频率项,使指令响应得到改善;而分母保持不变,因而稳定性裕度与扰动响应都没有受到任何影响。
在速度与加速度前馈结构下,传递函数为

加速度项在分子中增加了s3项,于是进一步改善了响应,但不影响分母结构。在理想情况下,即KAF=J/KT,KVF=1,则传递函数为“1”,电动机完全地跟随指令信号。当然,因为电流回路的响应能力是有限的,在指令信号是急剧变化的系统中,这样完全地跟随是不现实的。采用100%前馈时,电力变流器中的缺陷会引发超调。但是,两个前馈增益通常可以设置到理想值的80%以上,从而大大加快了对指令的响应。
因此,加速度前馈的突出优势就是在不降低位置环增益的条件下,消除由速度前馈引起的超调。加速度前馈同速度前馈相结合,使得系统的响应比单独只有速度前馈时快得多。在目前的伺服驱动器产品中,加速度前馈比速度前馈使用得少,但是正在越来越被重视。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。