



在实际应用中,电动机与其他机械传动装置连接时,电动机每转动一圈,将转换为相应的位移,带动负载运动。位置指令通常是由上位机产生的,是具有一定频率和个数的脉冲。当指令脉冲当量和位置反馈脉冲当量不一致时,采用电子齿轮的方法来进行调节是必需的,它的好处可以用一个例子说明。
如图7-22所示,位置环中没有电子齿轮设计时,要将工件移动10mm,上位机要做如下处理:
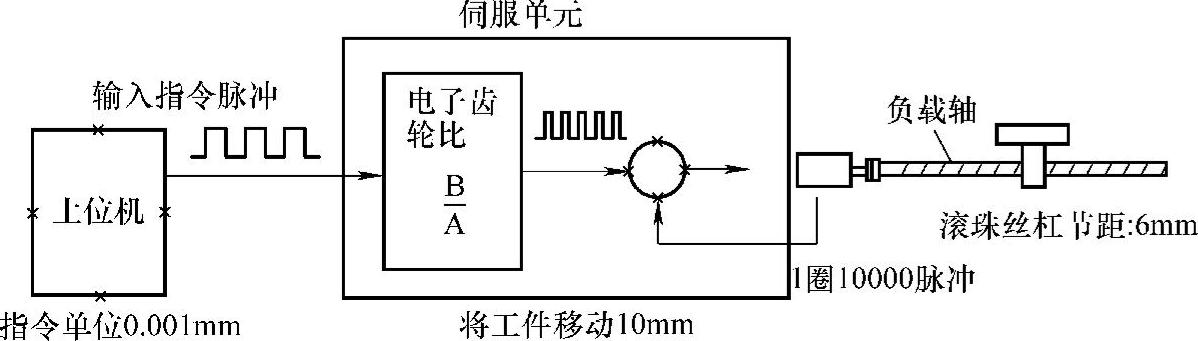
图7-22 电子齿轮功能
①电动机转1圈为6mm,移动10mm需要1.6666圈;
②转动1圈需要10000个脉冲,转动1.6666圈,一共需要16666个脉冲;
③发出16666个指令脉冲。
上位机在每次送出指令脉冲之前,都要进行上述“变换”,受限于机械结构,并且相应地增加了运算量。
位置环中使用电子齿轮设计,事先根据机械条件,设定好电子齿轮比分子和分母的值,参数一旦设定好,只要机械条件不变,就无需再次修改。由于电子齿轮功能的存在,上位机不用再进行“变换”指令,彻底与机械结构脱离关系。具体方法是:
①首先确定机械要移动1μm,需要多少个脉冲,由转1圈移动6mm计算出转动10/6个脉冲可以移动1μm;(https://www.xing528.com)
②接下来设定电子齿轮比,电子齿轮分子为10,分母为6;
③最后在上位机选定脉冲当量为1,即1个脉冲代表移动1μm,这样要移动10mm,上位机按指令单位计算出要发送10000个脉冲。
这样,上位机不再需要额外计算,只要把插补器送出的值折算成脉冲当量值后发出脉冲即可。
根据上例,可以定义出电子齿轮比。假定相对于每一脉冲信号的机械运动部件的位移单位为a微米,即脉冲当量为a。(a一般为1或者10、100、1000等。)在该机械结构下,电动机转动1圈(有P个反馈脉冲)需要移动x微米,则电子齿轮比K为:

式中 A——电子齿轮比分子;
B——电子齿轮比分母。
实际应用中,K一般取值范围为0.01~100,如果根据a、P、x计算出的K超出了这个范围,伺服单元不能正常动作,这时需要变更机械构成,或者变动指令单位a。
电子齿轮是位置环中的一个特殊功能,它通常放在位置环的给定通道入口处,齿轮比值K的变化实际上只是调节了位置指令脉冲频率,从而改变了电动机的转速。因此改变齿轮比值不会影响位置环的性能。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。