



根据上节得到的电流环结构如图7-12c所示,按典型Ⅰ系统设计电流环,电流控制器ACR设计为PI型。把ACR为PI型带入方框中,进行简化,预期会得到图7-15所示的结果。由于电流环具有低通特性,该电流环的闭环传递函数可以等效为

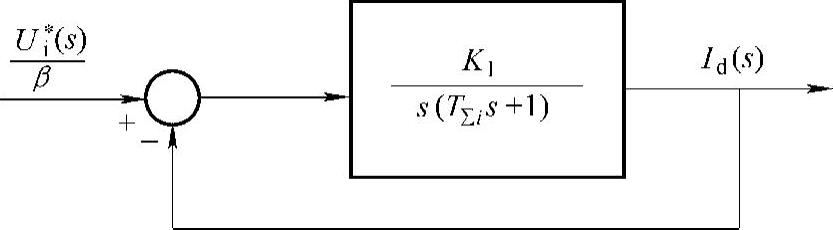
图7-15 校正成典型Ⅰ型系统的电流环动态结构框图
式(7-33)代替图7-15的电流闭环,作为转速环的一个环节,于是整个转速环的结构框图如图7-16a所示。和前面一样,把给定滤波和反馈滤波的环节等效地移到环内,同时把两个小惯量环节合并起来,近似成一个时间常数的惯性环节,即
T∑n=Ton+2T∑i (7-34)
则转速环结构框图可简化成图7-16b。按典型Ⅱ系统设计转速环,转速调节器ASR设计为PI型,校正后的转速环最终结构框图如图7-16c所示。

图7-16 转速环的动态结构框图及其近似处理
因为电流响应要比转速响应快很多,有时为了便于分析,图7-16需要简化结构,在转速环中把电流环等效的部分被理想化为“1”,省略滤波环节,电动机用KT/Js等效,则简化后的转速环动态结构框图如图7-17所示。(https://www.xing528.com)

图7-17 简化的转速环动态结构框图
目前,ASR环节主要由PI结构构成的居多,但是也存在IP控制结构。把图7-17中ASR框图按图7-18所示展开,于是得到PI控制结构(图7-18a)和IP控制结构(图7-18b)。由PI结构得到图7-17的响应传递函数和扰动传递函数依次为
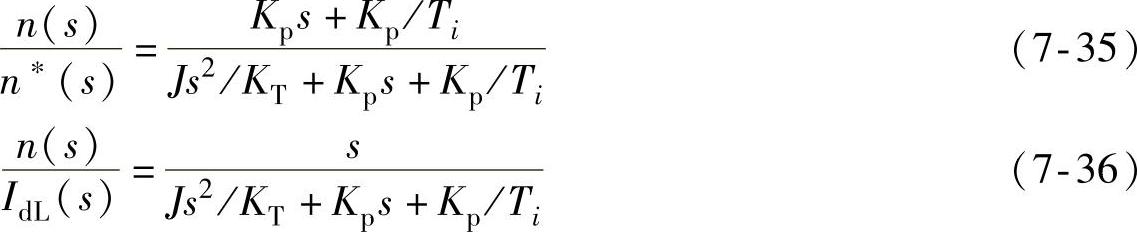
由IP结构得到图7-17的响应传递函数和扰动传递函数依次为
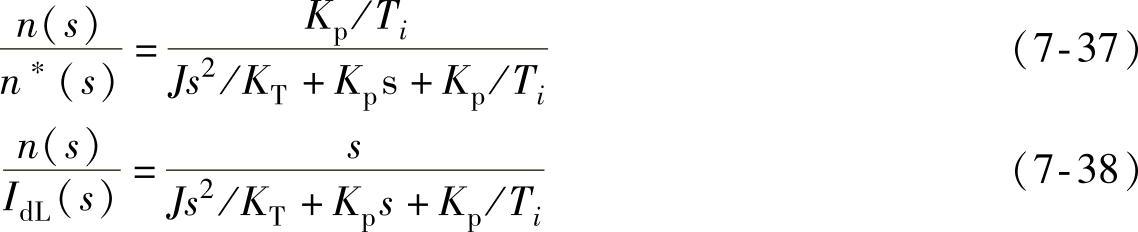
比较式(7-35)和式(7-37)得出:两者都具有低通特性,然而PI分子有s的1次项,它会比IP阶跃响应得快,同时也会比IP容易发生超调。由式(7-36)和式(7-38)可知,两者扰动传递函数结构是相同的,扰动性是相似的。因此,当PI控制器不能提供必要的性能时,可以考虑应用IP控制器获得较好的性能,一个实际应用的例子如图7-18c所示,它通过改变开关量来对其两种控制结构进行切换。

图7-18 PI控制结构与IP控制结构
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。