



把电流环单独拿出来设计时,首先遇到的问题是电动势产生的交叉反馈作用,它代表转速环输出对电流环的影响。现在还没有轮到设计转速环,要考虑它的影响自然是比较困难的。现在研究一下反电动势对电流环的影响。电流环中包含反电动势部分的结构如图7-11a所示。为了简单起见,假定为理想空载,即IdL=0,再将反馈引出点移到电流环内,得结构框图图7-11b。利用反馈连接等效变换,最后得到图7-11c。当TmTlω2>>1时,图7-11c中第一个方框内的传递函数可近似为

于是,得到图7-11d。
这样,在设计电流环时,电流环近似结构如图7-12a所示,这也是电流环将电动势反馈作用断开,从而得到忽略电动势影响的电流环结构框图。再把给定滤波和反馈滤波两个环节等效地移到环内,得到图7-12b。最后,Ts和Toi当作小惯性环节处理,看成一个惯性环节,即
T∑i=Ts+Toi (7-28)
则电流环结构框图最终化简成图7-12c。因此,按要求把电流环设计成典型Ⅰ系统,确定出电流调节器ACR结构为PI型。
由此得出,忽略反电动势E对电流环的作用,其近似条件为
TmTlω2>>1 (7-29)
从工程观点上看,只要TmTlω2≥10就可以认为是远远大于1了,作为近似条件,可以粗略地取电流环的截止频率ωci为

然而在近似条件下,即式(7-30)不满足时,就需要考虑反电动势E对电流环的影响,电流环的结构,即图7-12c变为图7-13所示。图中,当ACR为PI型,电流环稳态误差为

式中 KI——ACR中积分系数。
显然,在PI控制器的作用下,系统存在稳态误差,必须采取措施消除影响。(https://www.xing528.com)
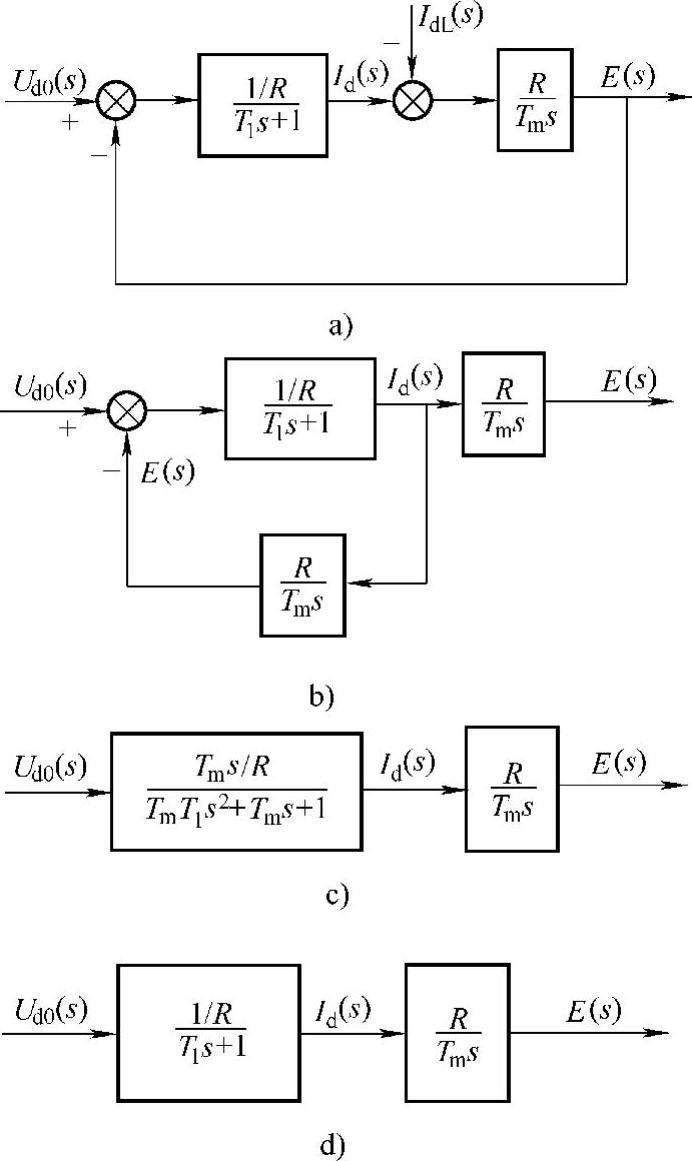
图7-11 反电动势作用结构框图的等效变换
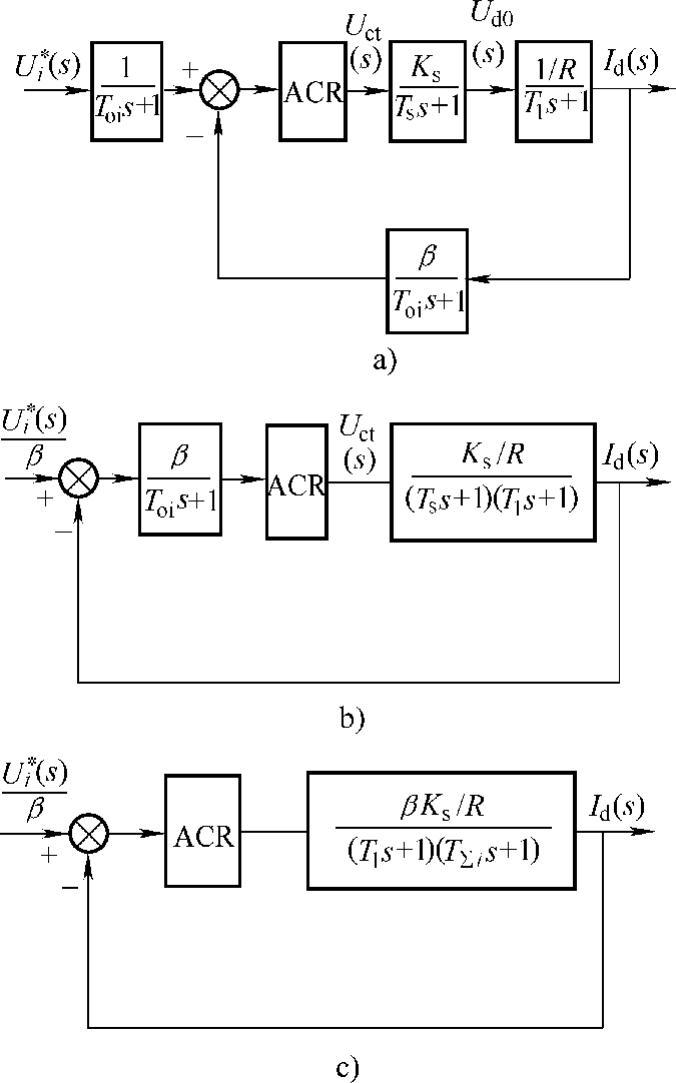
图7-12 电流环的动态结构框图及其化简

图7-13 考虑反电动势的电流环动态结构框图
通常有两种解决方案。一种是改变ACR结构,在PI的基础上,增加一个二重积分环节:

上式能够抵消图7-13分母中的二次多项式。增加此环节后,电流环可以实现稳态无差的跟踪给定信号。然而,也可以看出,该方案对电动机参数是敏感的,当参数调节不合适时,系统响应不仅会变差,甚至有可能使系统损坏。
另一种方案是电动势补偿的方法,即在电流环结构框图的基础上增加补偿环节,如图7-14所示。图中,用参数K∗e表述补偿功能,将补偿电动机本身固有的反电动势对电动机端电压的消弱作用。当电动机转速为零时,电动机转角也为零,则电动机本身不存在反电动势的作用,也不存在对反电动势的补偿作用。当电动机转动后,电动机本身产生的反电动势将通过K∗e所在的回路得到补偿。
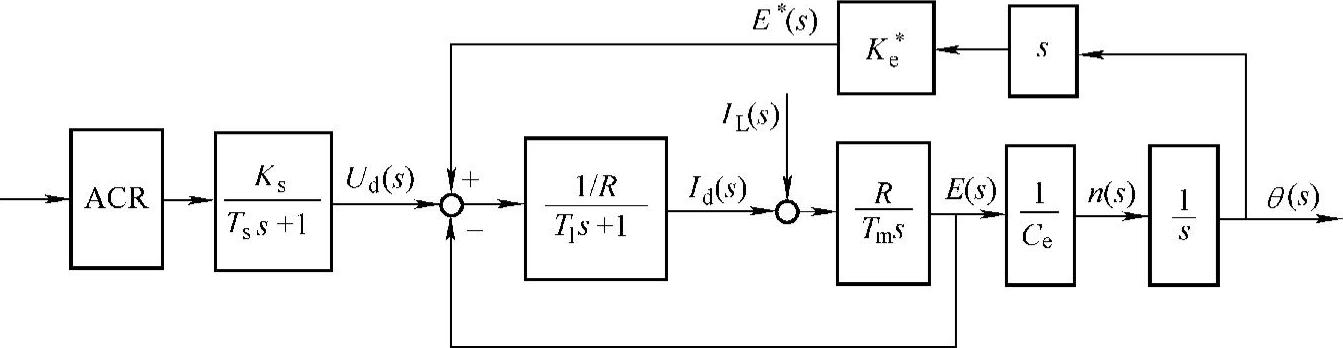
图7-14 反电动势补偿结构框图
补偿反电动势所取的速度信号由位置传感器信号θ经过差分得到,经过K∗e得到补偿电压值E∗,K∗e设定得不同,E∗的结果自然也不同。如果K∗e=Ce,则理想的补偿结果能够完全抵消反电动势的影响,但是在实际的应用中,由于系统存在低频摩擦死区环节和数字控制采样滞后等时滞环节,会影响到补偿的效果。然而,与之前没有任何补偿时相比较,电流环响应还是有明显的改善。因此,该方案由于实现简单,不受电动机参数的影响,更有实际应用的价值。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。