



编码器分为光电式和电磁式,后者的分辨率和准确度远不如前者,所以现在大部分场合还是采用光电式编码器。光电式旋转编码器的基本结构如图6-10所示,由以下四个部分组成:光源、转盘、固定孔和受光器件。转盘又称为动光栅,固定孔又称为定光栅或是遮光板。使用LED(发光二极管)作为光源,光线通过转盘狭缝和固定狭缝,被光电管接收,转换成为电信号,然后经过比较器把电信号进行整形,变为数字信号输出。
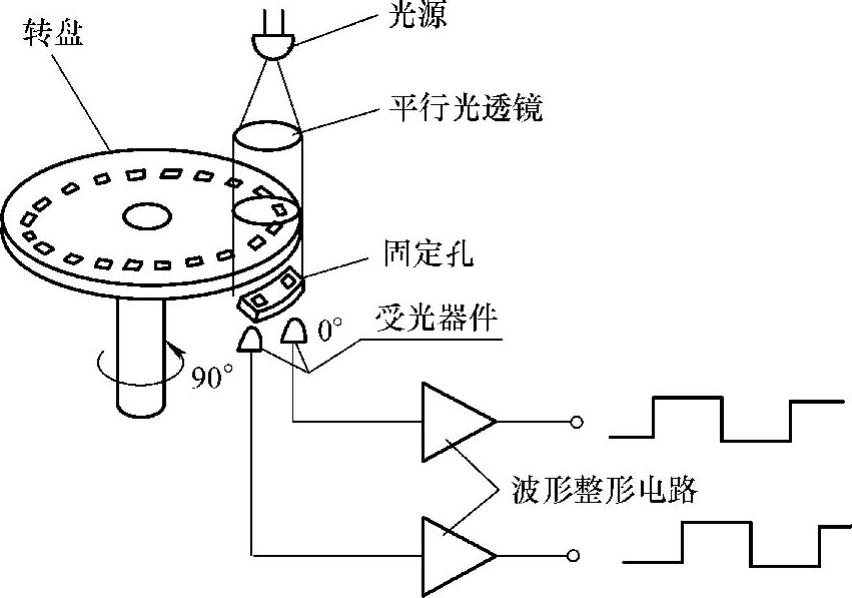
图6-10 光电式旋转编码器的基本结构
光电式编码输出的响应频率取决于受光器件、电子处理电路的响应速度。编码器的分辨能力是以编码器轴转动一周所产生的输出信号,也就是用脉冲数/转(ppr)表示的,并以此定义为编码器的分辨率,因此光栅盘上的槽或窗口数目就等于编码器的分辨率。通常受光器件和电子处理电路的响应速度是不会限制编码器的输出响应频率的,因此光电编码器可满足大多数伺服应用的要求,反馈速度快,输出可以看做理想的传感器。这样一来,编码器的分辨率决定了最高转速。
编码器转盘狭缝和固定狭缝一般是在玻璃片上刻制而成。在玻璃片的表面上,蒸附着一层金属铬,然后利用光刻技术按等距加工制成。狭缝宽度限制了编码器的分辨率,编码器分辨率越高,所需的狭缝宽度越小,甚至小到无法加工的程度,同时,狭缝非常细,也限制了LED的透光量,所以这种结构的编码器很难提高分辨率。在工业电气传动中,根据不同的应用对象,可选择分辨率为500~5000ppr的光电式增量型编码器。在国内,交流伺服控制系统中常选用分辨率为2500ppr的增量型编码器。
光电式增量型编码器的特点是每产生一个输出脉冲信号就对应一个增量位移角,但不能通过输出脉冲区别是哪一个增量位移角,即无法区别是在哪个位置上的增量,编码器能产生与轴角位移增量等值的电脉冲。这种编码器的作用是提供一种对连续轴角位移量离散化或增量化以及角位移变化(角速度)的传感方法。(https://www.xing528.com)
在交流伺服电动机中使用的增量型编码器的输出信号有6路,即A、B、Z相和U、V、W相,且每路差分输出,如图6-11所示。编码器接口电路采用一种称为正交解码的技术,基于A、B相信号来实现。通常,遮光板上所刻制的两条缝隙A和B使输出信号的电角度相差90°,即所谓两路输出信号正交。由于正交的缘故,可以通过A与B之间相位超前或滞后电角度来判定电动机转动的方向。同时,在增量型编码器中还备有用作参考零位的标志脉冲或指示脉冲Z,圆盘每转动一周,只发出一个标志脉冲。因此,在转动圆盘和遮光板相同半径的对应位置上刻有一道透光缝隙。标志脉冲通常与数据通道有着特定的关系,用来指示机械位置或对累积量清零。
U、V、W相用来检测交流伺服电动机的磁极位置。它们的相位相差120°电角度。如果电动机的磁极数为2p(p为极对数),则分辨率为p脉冲/转。通常,伺服系统根据这个信号来检测出磁极的初始位置,把磁极所在区间的中间位置作为矢量控制的初始位置角。因此,这个初始位置角总是存在一定的误差,误差范围在-60/p~60/p电角度之间。不必担心初始角的检测误差,它不会影响电动机稳定起动时对初始角检测的要求。而且通常当永磁体磁极转动遇到Z相脉冲后,会根据Z信号作为零位置重新标定转子位置,此后转子位置的准确度由编码器A、B正交后产生的4倍分辨率决定。

图6-11 光电式增量型编码器的组成与输出信号波形
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。