



第一种检测方法如图6-1所示,是利用霍尔元件检测电流。霍尔元件检测原理是在被切去一部分的铁心上绕上导线,然后在铁心的切口处放置霍尔元件,通过检测霍尔元件的输出电压来检测电流。在PWM逆变驱动电路模式下,如果把电动机定子绕组相端子的导线绕在缺口铁心上,变化的相电流改变了磁场强度,从而使霍尔元件输出电压发生变化,这个微小的变化通过差分运放及驱动补偿后,输出电压或者电流的检测信号。这种直放式霍尔电流传感器性能稳定,可靠性高,且电路简单,但是带宽较窄,适合于测量直流到数千赫电流。
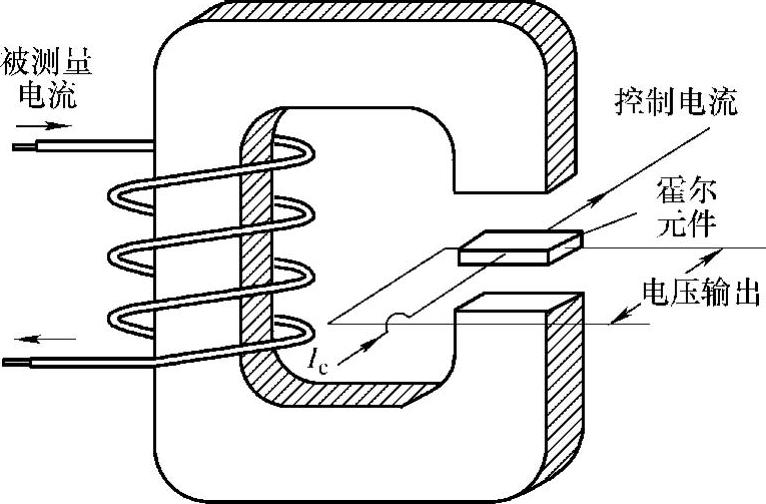
图6-1 霍尔元件的电流检测原理
磁平衡式霍尔电流传感器是在前述原理的基础上,加上了磁平衡原理。即集磁环上增加补偿线圈N2,一次电流所产生的磁场作用于霍尔元件,输出电压信号经过功率放大器输出补偿电流,补偿电流作为负反馈流入二次补偿线圈。二次补偿线圈产生的磁场与一次电流产生的磁场相反,因而补偿了一次磁场,使霍尔输出逐渐减小,当一次和二次磁场相等时,补偿电流不再增大,这就是磁平衡检测的原理,如图6-2所示。
图6-2主要由磁电转换部分、放大部分及驱动补偿线路部分组成。其瞬态工作过程如下:当I0通过磁环,霍尔元件检测出N1I0所产生的磁场信号,经功率放大器A输出U0,并提供反馈电流I。由于N2为补偿线圈,I流过线圈时不会发生突变,而是逐渐上升。N2I所产生的磁场补偿了N1I0所产生的磁场,使霍尔元件输出降低,同时减慢I上升。当N2I=N1I0时,磁场为零,霍尔元件输出为零。由于线圈的缘故,I还会再上升,这样N2I>N1I0,使霍尔元件输出变号,同时I减小。如此反复在平衡点附近作振荡,因此这样的平衡为动态平衡。建立时间往往在1μs以内,整个测量回路形成闭环系统。从图中分析可以得到,整个回路的频响,关键在于中间的功率放大器部分,放大级往往设计成具有较大的增益和较高的电压上升速率,这样才能保证I快速跟随I0,因此它与直放式相比,能够使测量回路具有较宽的带宽和较高的测量准确度。
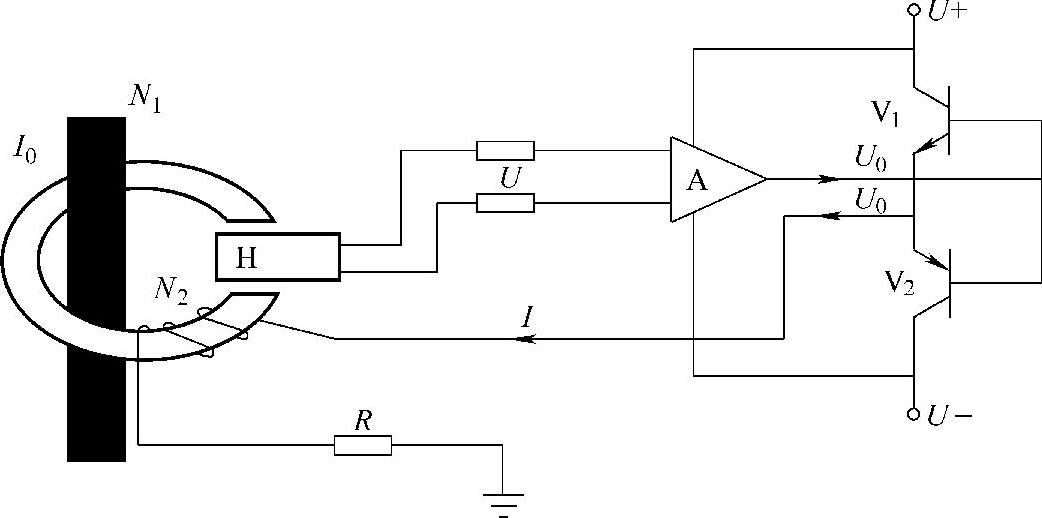
图6-2 磁平衡式霍尔电流传感器检测原理(https://www.xing528.com)
目前大部分市售的霍尔检测元件已被制造成模块化产品,从厂商提供的性能表中可看出,霍尔磁平衡式电流传感器一般响应时间在1μs以内,上升速率可达到50A/μs,带宽为0~50kHz,检测相对误差低于1%,并且利用调整线圈的匝数,检测范围可以从1A以下的小电流,直至100A以上的大电流。因此常被用于伺服控制系统中,作为电流检测装置。
为了满足A-D采样器件的输入要求,通常这种电流传感器需要外置运放电路,如图6-3所示。图中是一种霍尔电流传感器的典型采样电路,由于TI公司的某些DSP芯片内部的模-数转换器(ADC)模块要求输入0~3V的单极信号,因此必须将霍尔电流传感器(LEM电流传感器)输出的小电流信号转换为电压信号(电阻R1两端),再经过放大滤波(AD7650放大器)后输入DSP。这样,就可将具有正负极性的电流反馈信号转换成单极性信号送入DSP。
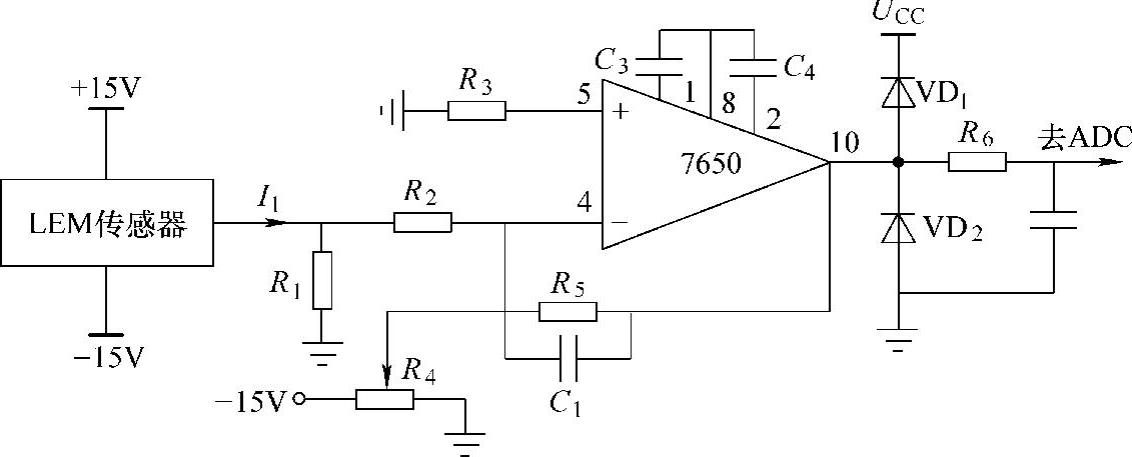
图6-3 LEM传感器电流采样电路
考虑到这种较为理想的电流传感器成本相对较高,下节介绍另外一种电流检测方法,其特点是在检测20A以下的小电流的场合,具有价格优势,并且同样具有较高的测量准确度。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。