



在数字控制系统中,量化是一个值得注意的实际问题。量化是数字控制系统的一种非线性效应,它来源于传感器的局限分辨率,量化过程导致了量化误差和极限环。如果传感器的分辨率足够精细,量化过程的影响就可以忽略。
1.量化误差
连续信号x(t)经过一定位数A-D转换器的量化(不考虑采样过程)后变成x∗(t),其误差定义为

式中 x∗(t)——量化前的采样信号;
 (t)——量化后的采样信号;
(t)——量化后的采样信号;
e——量化误差,可取0~q之间的任意值,q为量化单位。
量化结果 (t)有两种处理方式,即“有舍有入”和“只舍不入”。“只舍不入”是把结果的小于q的部分置为0;“有舍有入”类似四舍五入,把结果小于0.5q的部分置为0,大于等于0.5q的部分置为1。可见,这两种量化特性曲线都为阶梯状,为非线性特性。
(t)有两种处理方式,即“有舍有入”和“只舍不入”。“只舍不入”是把结果的小于q的部分置为0;“有舍有入”类似四舍五入,把结果小于0.5q的部分置为0,大于等于0.5q的部分置为1。可见,这两种量化特性曲线都为阶梯状,为非线性特性。
下面对其特性进行分析,由于e在0~q之间机会均等,因而是在[0,q]区间上均匀分布的随机变量,这种随机变量称为量化噪声。因为是随机变量,因而量化误差或者量化噪声需要用概率论的方法进行分析,其中主要包括数学期望E(e)和标准差σ(又称均方差):
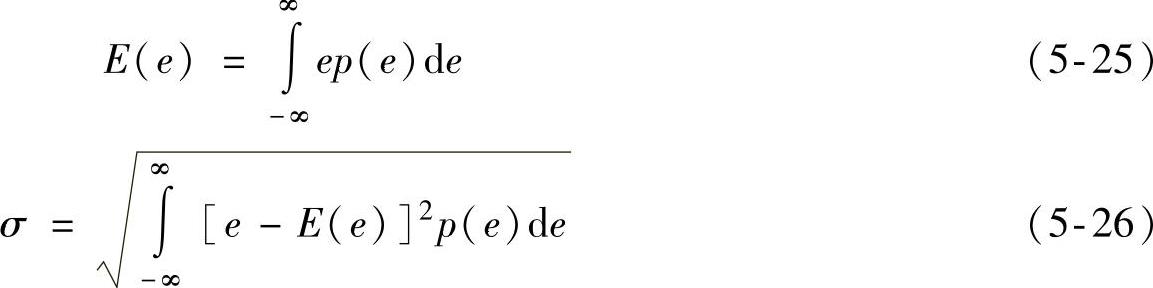
式中 p(e)——概率密度。
图5-8给出了两种量化结果的概率密度,结合式(5-25)和式(5-26)可计算出它们的量化特性,见表5-1。由表比较可知,它们的标准差相同,但“有舍有入”法最大误差小,且是无偏的。所以绝大部分A-D转换器采用的都是“有舍有入”方式。
表5-1 两种量化过程的误差分析

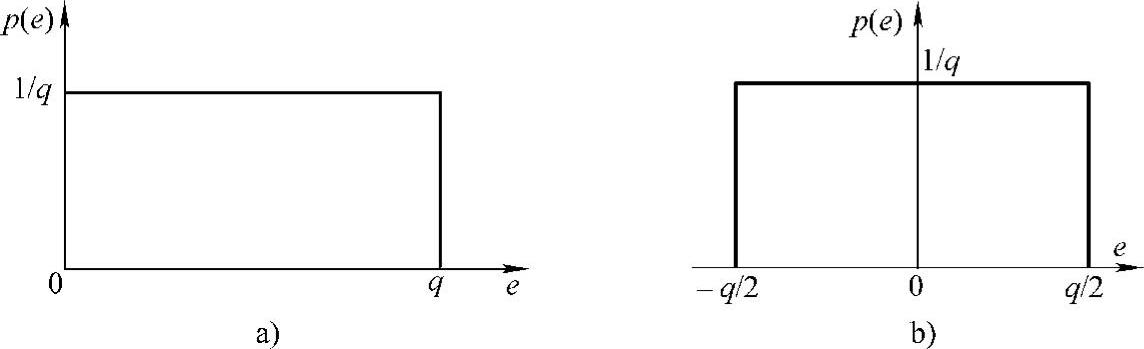
图5-8 两种量化方法的概率密度
a)“只舍不入”法 b)“有舍有入”法
为了减小量化误差e,应尽量减小量化单位q。q的计算方法为(https://www.xing528.com)

式中 xmax——模拟信号最大值;
xmin——模拟信号最小值;
i——字长;
m——级数或层数。
由式(5-27)可见,(xmax-xmin)是一定的,i决定着q,如图5-9所示。当i短q大时,量化过程产生低频大幅度量化噪声;而当i长q小时,量化过程产生高频小幅度量化噪声其量化噪声。x(t)变化迅速,噪声频率加快。
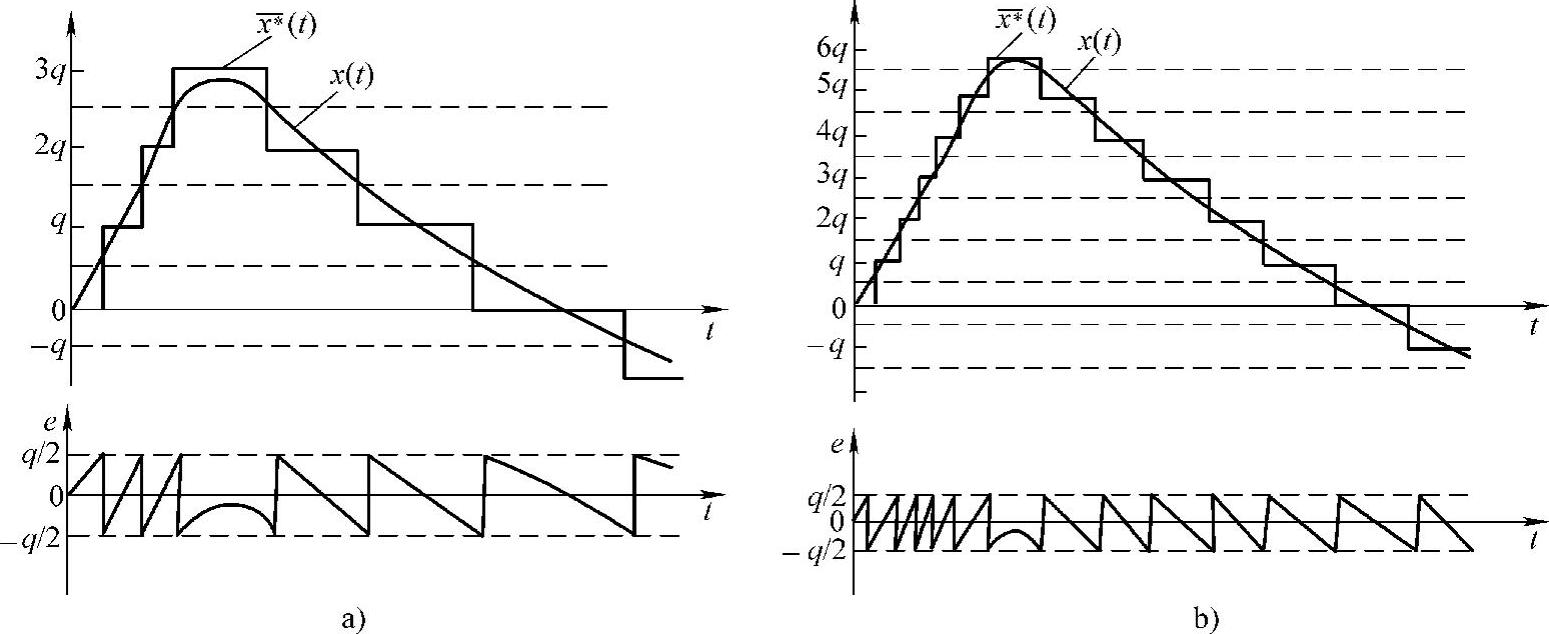
图5-9 量化噪声曲线
a)i短 b)i长
上述两种情况的量化噪声夹杂在输入信号中进入数字控制器,并随计算程序传递到输出量中,使数字控制系统输出信号中也含有噪声分量,从而导致输出不平滑。通常,系统具有低通滤波特性,可以抑制高频噪声,但较难抑制低频噪声。因此,数字控制器的字长不宜太短,除采用数字滤波器外,A-D转换器的字长i要在最大限度上尽可能地选择较大。
2.极限环
量化的另一种影响称为极限环,它是非线性系统特有的特征。在相平面上,一个极限环定义为一个独立的闭曲线,如图5-10所示。轨线必须是闭合的,而且是独立的。当时间t→∞时,极限环附近的所有轨线收敛于这个极限环,则称为稳定极限环;当时间t→∞时,轨线逐渐远离极限环,则称为不稳定极限环;当时间t→∞时,某些轨线逐渐收敛于极限环,而另一些轨线偏离极限环,则称为半稳定极限环。
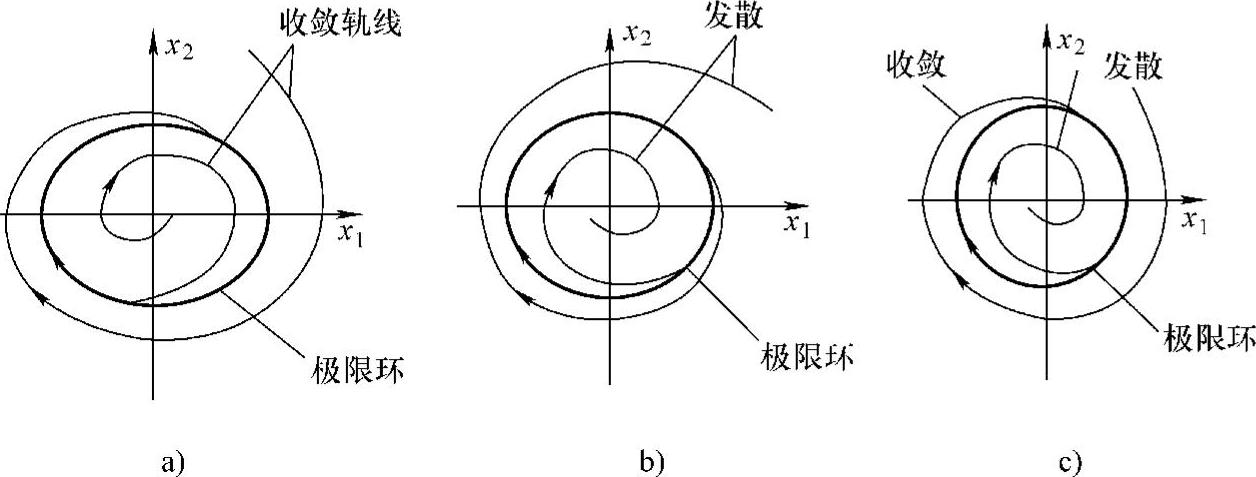
图5-10 极限环轨迹
a)稳定极限环 b)不稳定极限环 c)半稳定极限环
在数字计算中,极限环是由量化误差引起的低强度振荡。虽然它可以产生持续的振动,振荡频率低,幅值比量化单位q大许多倍,但它是稳定极限环。有两种方法可以减小极限环的幅值。一种方法是提高运算的分辨率,即选择浮点运算或者增长整型数学运算的字长。另一种方法是引入抖动,即在输入信号上叠加一连续变化的信号。抖动实质是提高了A-D转换过程的信噪比,或者说是提高了A-D的分辨率,从而大大减小极限环振动的幅值,甚至可以忽略极限环。因此,抖动信号是抑制极限环幅值的关键。然而,实际上抖动信号的选择往往凭借更多的是经验而不是理论,关于抖动信号的具体例子请看第6章“传感器技术和检测数据处理”6.4.1节“过采样和A-D分辨率”中所述。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。