



上一节介绍的SPWM控制技术是以输出电压近似正弦波为目标的,但是对于交流电动机来说,闭环电流的正弦波控制显然要比开环电压的正弦波控制能够获得更好的性能。电流跟踪PWM技术是一种闭环控制方法,这种方法不是用信号波对载波进行调制,而是把希望输出的电流波形作为指令信号,把实际电流波形作为反馈信号,通过比较两者的瞬时值来决定逆变电路各功率开关器件的通断,使实际的输出跟踪指令信号变化。因此,这种控制方法称为电流跟踪控制法。
在电流跟踪控制法中,指令与实际之间的偏差通常需要先经过比较器后,才能控制逆变器开关器件的通断时刻。一般情况下,两种典型特性的比较器:具有滞环特性的称为滞环比较器,其PWM控制技术又可称为滞环跟踪PWM控制技术;具有三角波特性的称为三角波比较器,其PWM控制技术又可称为三角波跟踪PWM控制技术。
三相电流滞环跟踪PWM控制原理如图4-6所示,三相给定参考信号i∗U、i∗V和i∗W虽然相位依次相差120°,但是三相具有相同的控制特性。下面以U相为例进行说明,图中,电流控制器是带滞环的比较器HBC,滞环宽度为2h。将给定电流i∗U与输出电流iU进行比较,电流偏差超过±h时,经过HBC,U相上、下桥臂功率开关管动作。
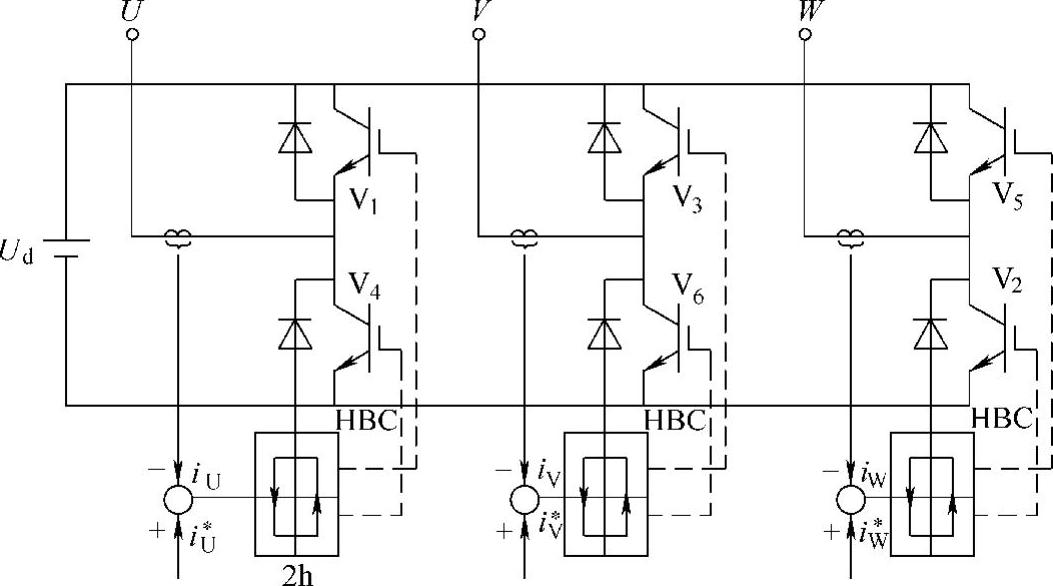
图4-6 滞环跟踪PWM工作原理框图
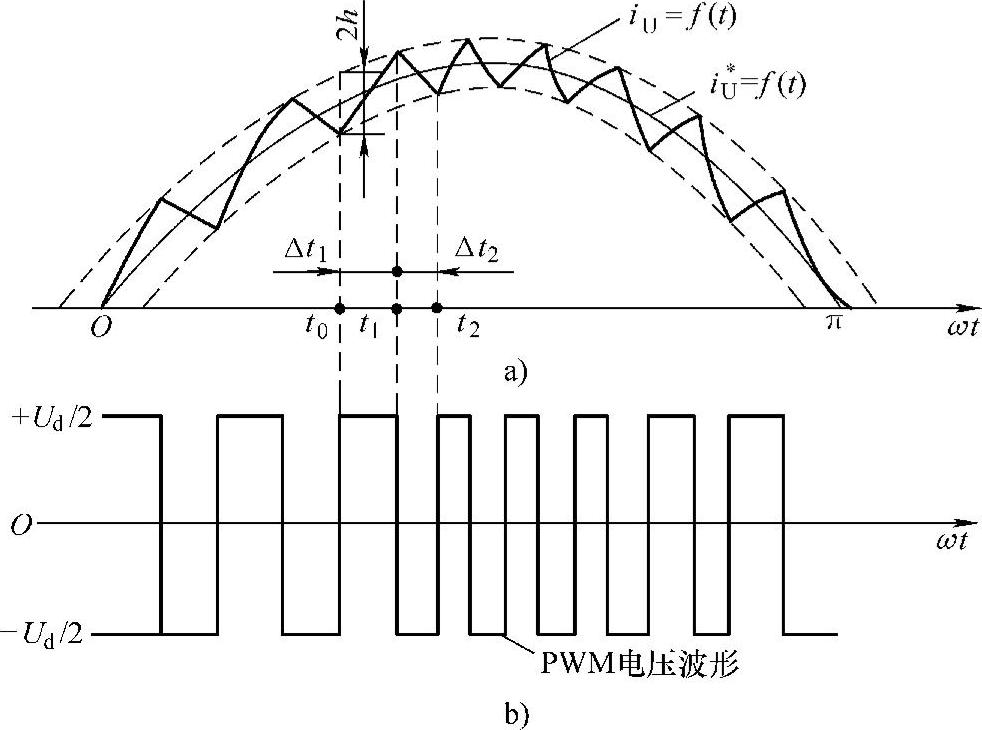
采用电流滞环跟踪控制时,电流波形和相电压波形如图4-7所示。图a中t0时刻iU<i∗U,且ΔiU=i∗U-iU≥h,滞环控制器HBC输出正电平,驱动U相上桥臂开关器件V1导通,iU继续增大。直到t1时刻,达到iU=i∗U+h,则ΔiU=-h,使滞环翻转,HBC输出负电平,关断V1,导通V4。此后iU逐渐减小,直到t2时刻,iU=i∗U-h,到达滞环偏差的下限值,使HBC再翻转,又重复使V1导通,V4关断。这样V1与V4交替工作,使输出电流iU与给定值i∗U之间的偏差保持在±h范围内;iU在正弦波i∗U上、下作锯齿状变化,波形十分接近正弦波。而与输出电流iU对应的输出相电压波形如图b所示,在iU上升阶段,输出相电压是+Ud/2,而在iU下降阶段是-Ud/2。
 (https://www.xing528.com)
(https://www.xing528.com)
图4-7 滞环跟踪PWM逆变电路电流和电压波形
三相电流三角波跟踪PWM控制工作原理如图4-8所示,和调制法不同的是,这里并不是把指令信号和三角波信号直接进行比较来产生PWM波,而是通过闭环来进行控制。从图中可以看出,把指令电流i∗U、i∗V和i∗W和逆变电路实际输出的电流iU、iV和iW进行比较,求出偏差电流,通过放大器A放大后,再去和三角波进行比较,产生PWM波形。放大器A通常具有比例积分特性或者比例特性,其系数直接影响着逆变电路的电流跟踪特性。为了改善输出电压波形,三角波载波常用三相三角波信号。
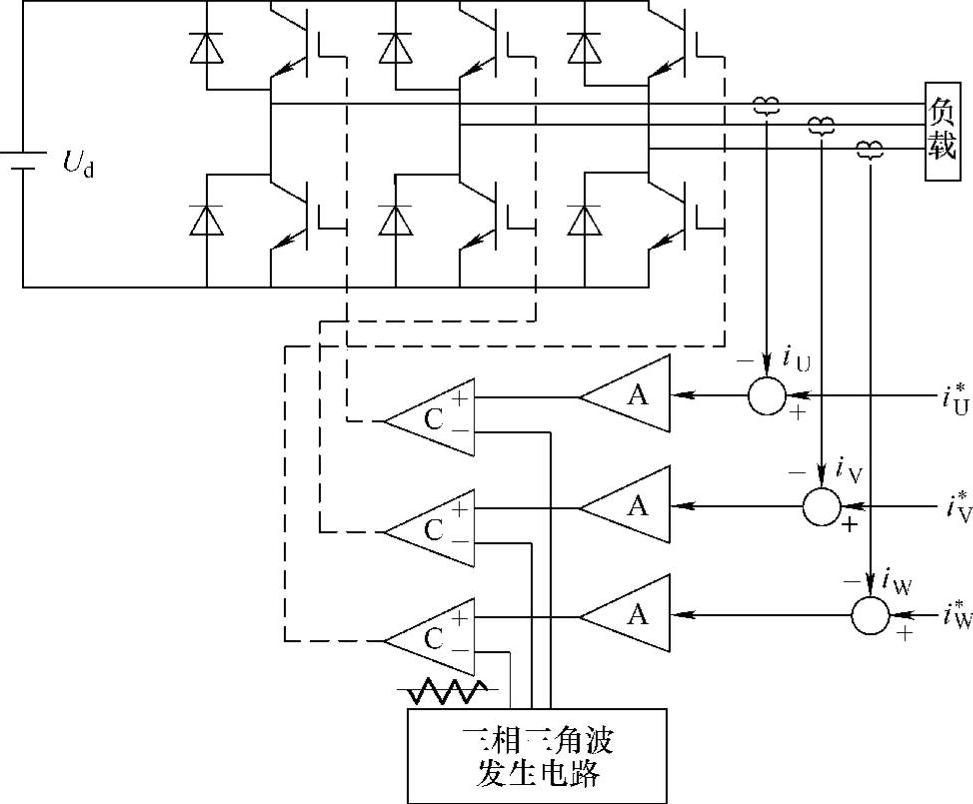
图4-8 三相电流三角波跟踪PWM工作原理框图
在这种三角波比较控制方式中,功率开关器件的开关频率是一定的,即等于载波频率,这给高频滤波器的设计带来方便。和滞环比较控制方式相比,这种控制方式输出电流所含的谐波少,因此常用于对谐波和噪声要求严格的场合。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。