



三相交流永磁同步电动机的多变量动态数学模型结构复杂,分析和求解起来十分困难,在实际应用中,必须设法进行简化。模型结构之所以复杂,关键在于模型结构中存在一个复杂的变参数电感矩阵。因此要简化数学模型,需从简化磁链关系入手。
直流电动机的数学模型比较简单,因为它的磁链关系简单。图2-3所示为两极直流电动机的物理模型,励磁绕组F和补偿绕组C都在定子上,只有电枢绕组在转子上。把F的轴线称作直轴或d轴,主磁通Ф的方向是沿着d轴的,A和C的轴线称为交轴或q轴。虽然电枢本身是旋转的,但通过换向器和电刷的作用,使电枢磁动势的轴线始终被限定在q轴位置上,其效果像是一个在q轴上静止的绕组,但实际上它是旋转的,切割d轴的磁通而产生旋转电动势,这又不同于真正静止的绕组,通常把这种等效的静止绕组称作“伪静止绕组”。电枢磁动势的作用可以用补偿绕组磁动势抵消,或是由于其作用方向与d轴垂直而对主磁通影响甚微,所以直流电动机的主磁通基本上惟一由励磁电流决定,这是直流电动机的数学模型及控制系统比较简单的根本原因。

图2-2 单对极永磁同步电动机物理模型
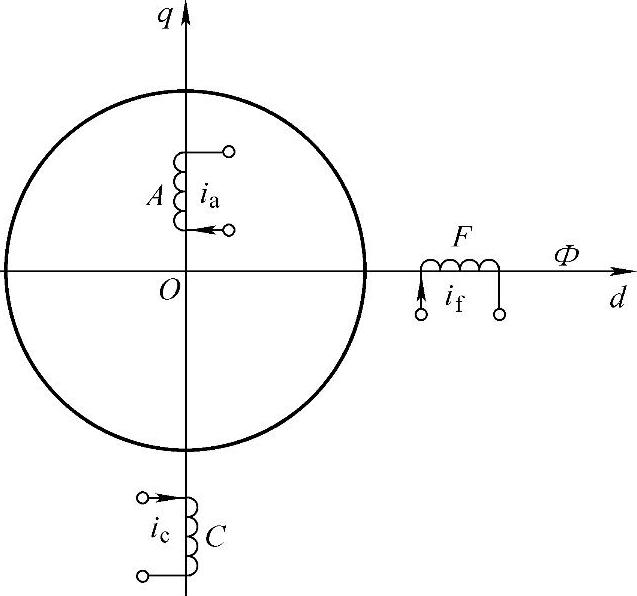
图2-3 两极直流电动机物理模型
如果能将交流永磁同步电动机的物理模型等效变换成类似直流电动机的模型,那么分析和控制将大大简化。坐标变换正是按照这条思路进行的。在这里,不同电动机模型彼此等效的原则是:在不同坐标下所产生的磁动势完全一致。
众所周知,在交流电动机三相对称的静止绕组A、B、C中,通以三相平衡的正弦电流iA、iB、iC时,所产生的合成磁动势是旋转磁动势F,它在空间呈正弦分布,以同步角速度ω1(即电流的角频率)顺着A-B-C的相序旋转。这样的物理模型如图2-4a所示,相当于图2-2中的定子部分。(https://www.xing528.com)
然而,产生旋转磁动势并不一定非要三相不可,除单相以外,两相、三相、四相等任意对称的多相绕组,通入平衡的多相电流,都能产生旋转磁动势,当然两相最为简单。图2-4b所示为两相静止绕组α和β,它们在空间互差90°,通入时间上互差90°的两相平衡交流电流,也能产生旋转磁动势F。当图2-4a和b的两个旋转磁动势大小和转速都相等时,即认为图2-4b的两相绕组与图2-4a的三相绕组等效。
再看图2-4c中的两个匝数相等且互相垂直的绕组d和q,分别通以直流电流id和iq,产生合成磁动势F,其位置相对绕组来说是固定的。如果人为地让包含两个绕组在内的整个铁心以同步转速旋转起来,则磁动势F自然也随之旋转,成为旋转磁动势。把这个旋转磁动势的大小和转速也控制成与图2-4a和b中的旋转磁动势一样,那么这套旋转的直流绕组也就和前面两套固定的交流绕组都等效了。从地面的角度看,这就是一套旋转的直流绕组,如果观察者以同铁心和绕组一起旋转的角度来看,d和q是两个通入直流而相互垂直的静止绕组,当磁通Ф的位置被控制在d轴上时,就和图2-3的直流电动机物理模型没有本质区别了。这时,绕组d相当于励磁绕组,绕组q相当于伪静止的电枢绕组。

图2-4 等效的交流电动机绕组和直流电动机绕组物理模型
a)三相交流绕组 b)两相交流绕组 c)旋转的直流绕组
由此可见,以产生同样的旋转磁动势为准则,图2-4a的三相交流绕组、图2-4b的两相交流绕组和图2-4c中整体旋转的直流绕组都彼此等效。或者说,在三相坐标系下的iA、iB、iC和在两相坐标系下的iα、iβ以及在旋转坐标系下的直流id、iq都是等效的,它们能产生相同的旋转磁动势。有意思的是:就图2-4c的d和q两个绕组而言,当观察者以站在地面上的角度看去,它们是与三相交流绕组等效的旋转直流绕组,如果以跳到旋转着的铁心上的角度看,它们就的的确确是一个直流电动机的物理模型了。这样,通过坐标系的变换,可以找到与交流三相绕组等效的直流电动机模型。如何求出iA、iB、iC与iα、iβ和id、iq之间准确的等效关系,这就是坐标变换的任务。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。