



在机床电气控制电路中广泛采用继电器和接触器来控制电动机的运转,这种控制方式称为继电器—接触器控制。
1.绘制、识读继电器—接触器电气控制电路图的原则
电气控制电路常用电路图、接线图和布置图来表示。
(1)电路图 电路图是根据生产机械运动形式对电气控制系统的要求,采用国家标准统一规定的电气图形符号和文字符号,按照电气设备的工作顺序,详细表示电路、设备或成套装置的全部基本组成的连接关系,而不考虑其实际位置的一种简图。电路图一般包括电源电路、主电路和辅助电路三部分。电路图能充分表达电气设备的用途、作用和工作原理,是进行电气控制电路安装、调试和维修的理论依据。绘制与识读电路图时应遵循以下原则:
1)电源电路画成水平线,三相交流电源相序L1,L2,L3自上而下依次画出,中性线N和保护地线PE依次画在相线之下。直流电源的“+”端画在上边,“-”端画在下边。电源开关要水平画出。
2)主电路是指流过大电流的动力装置及控制、保护电器支路,它由主熔断器、接触器的主触头、热继电器的热元件以及电动机等组成。主电路通过的电流是电动机的工作电流,其电流较大。主电路图要画在电路图的左侧并垂直于电源电路。
3)辅助电路一般包括控制主电路工作状态的控制电路、显示主电路工作状态的指示电路、提供机床设备局部照明的照明电路等。它是由主令电器的触头、接触器线圈及辅助触头、继电器线圈及触头、指示灯和照明灯等组成。辅助电路通过的电流都较小,一般不超过5A。辅助电路画在主电路的右侧,电路中与下边电源线相连的耗能元器件(如接触器和继电器的线圈、指示灯、照明灯等)要画在电路图的同一方,而电器的触头要画在耗能元器件与一边电源线之间。为读图方便,一般应按照自左至右、自上而下的排列来表示操作顺序。
4)电路图中,各电器的触头位置都按电路未通电或电器未受外力作用时的常态位置画出。分析原理时,应从触头的常态位置出发。
5)电路图中,不画出各元器件的实际外形,而采用国家标准统一规定的电气图形符号画出。
6)电路图中,同一电器的各元器件不按它们的实际位置画在一起,而是按其在电路中所起的作用分别画在不同电路中,但它们的动作却是相互关联的,因此必须标注相同的文字符号。若图中相同的电器较多时,需要在电器文字符号后面加注不同的数字,以示区别,如KM1、KM2等。
7)画电路图时,应尽可能减少线条和避免线条交叉。对有直接电联系的交叉导线连接点,要用小黑圆点表示,无直接电联系的交叉导线则不画小黑点。
8)电路图采用电路编号法,即对电路中的各个连接点用字母或数字编号。主电路从电源开关的出线端按相序依次编号为U11、V11、W11。然后按从上至下、从左至右的顺序,每经过一个元器件,编号都要递增,如U12、V12、W12;U13、V13、W13……。单台三相交流电动机(或设备)的三根引出线按相序依次编号为U、V、W。对于多台电动机引出线的编号,为了不致引起误解和混淆,可在字母前用不同的数字加以区别,如1U、1V、1W;2U、2V、2W……。辅助电路编号按“等电位”原则从上至下、从左至右的顺序用数字依次编号,每经过一个元器件,编号要依次递增。控制电路编号的起始数字必须为1,其他辅助电路编号的起始数字依次递增100,如照明电路编号从101开始;指示电路编号从201开始等。
(2)接线图 接线图是根据电气设备和元器件的实际位置和安装情况绘制的,只用来表示电气设备和元器件的位置、配线方式和接线方式,而不明显表示电器动作原理。它主要用于安装接线、线路的检查维修和故障处理。绘制、识读接线图应遵循以下原则:
1)接线图中一般表示出电气设备和元器件的相对位置、文字符号、端子号、导线号、导线类型、导线截面积、屏蔽和导线绞合等。
2)所有的电气设备和元器件都按其所在的实际位置绘制在图纸上,且同一电器的各元器件根据其实际结构,使用与电路图相同的图形符号画在一起,并用点画线框上,其文字符号以及接线端子的编号应与电路图中的标注一致,以便对照检查接线。
3)接线图中的导线分为单根导线、导线组(或线扎)和电缆,用连续线和中断线来表示。导线走向相同时可以合并,用线束来表示,到达接线端子板或元器件连接点时再分别画出。在用线束来表示导线组、电缆时,可用加粗的线条表示,在不引起误解的情况下,也可采用部分加粗。另外,导线及管子的型号、根数和规格应标注清楚。
(3)布置图 布置图是根据元器件在控制板上的实际安装位置,采用简化的外形符号(如正方形、矩形、圆形等)而绘制的一种简图。它不表达各电器的具体结构、作用、接线情况以及工作原理,主要用于元器件的布置和安装。图中各电器的文字符号必须与电路图和接线图的标注相一致。
在实际工作中,电路图、接线图和布置图要结合起来使用。
2.电气控制电路中的电气联锁装置
一台机床往往有多台电动机和许多部件,根据生产实际和生产安全的需要,这些电动机和部件组成了一定的电气系统。系统中各电动机和部件的动作应有先后次序并互相配合、互相制约。这些功能的实现往往要用到电气联锁装置。
电气控制系统中常用的联锁装置有以下几种:(https://www.xing528.com)
(1)多地控制 对大型机床或因操作环境的需要,常会在两个或两个以上操作地点各安装一套控制按钮。其接线原则是在控制电路中将所有起动按钮的常开触头并联,而将所有停止按钮的常闭触头串联。
(2)联锁控制 为使机床设备按规定的工艺要求、安全可靠地进行工作,常常要求一些电器和生产部件按一定顺序工作或有相互制约功能。因此,要在线路中采取相应措施防止事故的发生。其中主要的措施是在系统中采用联锁装置。联锁装置分为互相制约(互锁)、按先决条件制约和自锁三种。
1)互锁控制:当生产机械的两个或两个以上部件同时运动会发生事故时,应采用互锁控制电路。这种电路多用于电动机的正反转控制、移动部件的移动和夹紧、主拖动系统和辅助拖动系统之间的联锁。互锁电路构成的原则是:将两台不允许同时工作的接触器的常闭触头串入对方线圈所在的控制电路中,从而使两路控制电路不能同时通电。
2)按先决条件制约的联锁电路:当要求生产机械或其中一部分机构只有满足一定条件时才允许起动时,一般采用这种联锁电路。如铣床控制电路中只有当主轴转动后才允许工作台进给;也有些机床,只有当润滑系统工作后才允许起动其他部件。这种电路的接线原则是:将条件动作的接触器的常开触头与受条件制约的接触器或继电器的线圈串联起来。
3)自锁控制:多用于机床的点动及连续工作状态的控制。常用的方法有用转换开关控制、利用复合按钮控制和利用继电器控制。
(3)顺序控制按工艺要求,使机械设备及电动机的起动或停止必须按照一定的顺序来完成,这种控制方式称为电动机的顺序控制。顺序控制的实现可采用以下两种方式:
1)在主电路中实现顺序控制。顺序起动控制电路的接线原则是:将控制一台电动机的接触器辅助触头接在控制另一台电动机的接触器辅助触头的后面,如图1-22a所示。
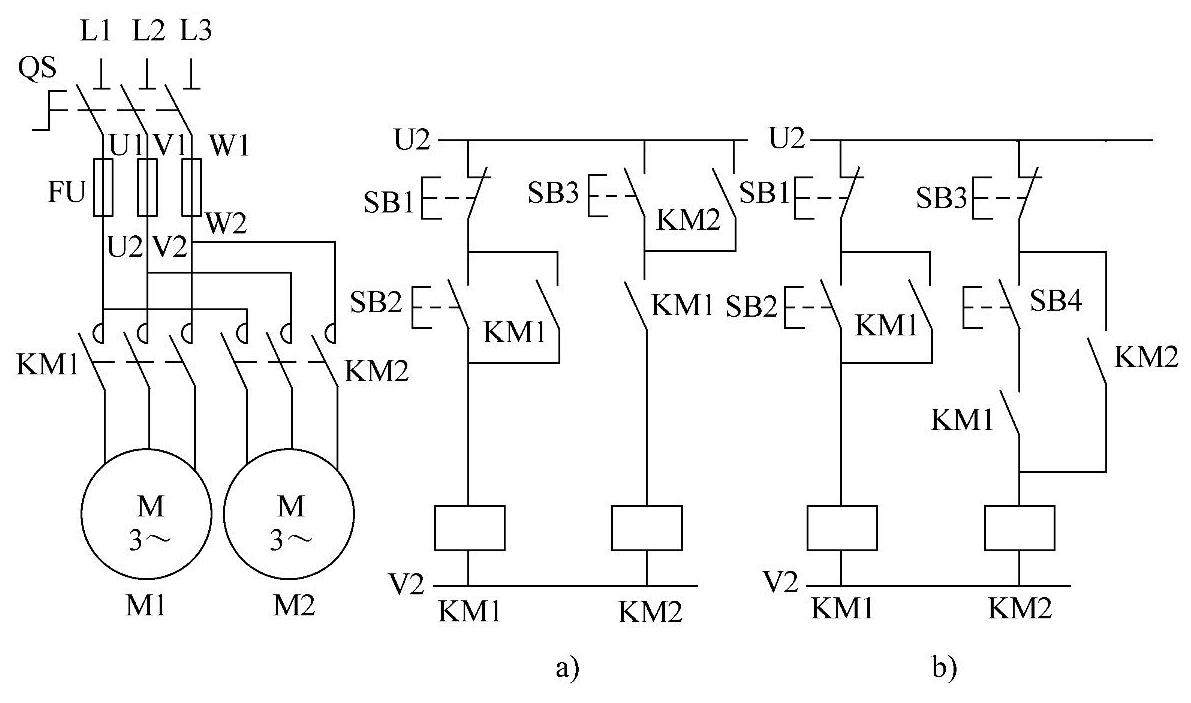
图1-22 顺序控制电路
2)在控制电路中实现顺序控制。图1-22b所示控制电路的接线原则是:将控制电路中先起动电动机的控制接触器KM1的常开触头串入后起动电动机的控制接触器的线圈中,这样就保证了M1起动后,M2才能起动的顺序控制要求。
3.准确停止系统
准确停止系统又称为定位系统。在生产过程中往往要求一些运动着的部件、工具、被加工件等停在指定位置上,这时就必须采用准确停止系统,它是生产加工中不可缺少的技术。往往加工精度及自动化程度越高,要求的定位位置越准确。为达到准确定位的目的,一方面要能在一定精度范围内测出被定位物体的位置,同时还要根据指令对驱动电动机或生产机械运行进行迅速有效的制动,使之立即停止。因此,在停止系统中一般分为对被定位物体进行检测和对驱动电动机进行驱动或停止两部分。系统的定位方式有电气式、机械式、空气式、光学式及复合式。
在电气控制系统中最常用的是电气式定位,其检测元件主要有位置开关、按钮、接近开关、步进电动机和电气直线标尺(磁栅、感应同步器等)。在电气定位中,检测信号多为电信号。电信号一般分为模拟量和数字量。如果某电气系统只对检测信号进行响应,称为开环控制系统。如果除对检测信号响应外,还对被定位物体进行重新检测和校正定位,该系统称为闭环控制系统。
机床设备中常采用位置开关、半导体接近开关及配合电动机制动装置进行定位,如电磁制动器、电磁离合器等。上述控制方式属于机电控制的定位方式。数控机床中常采用步进电动机进行定位控制,属于数字控制的定位方式。
4.双速电动机控制电路的分析
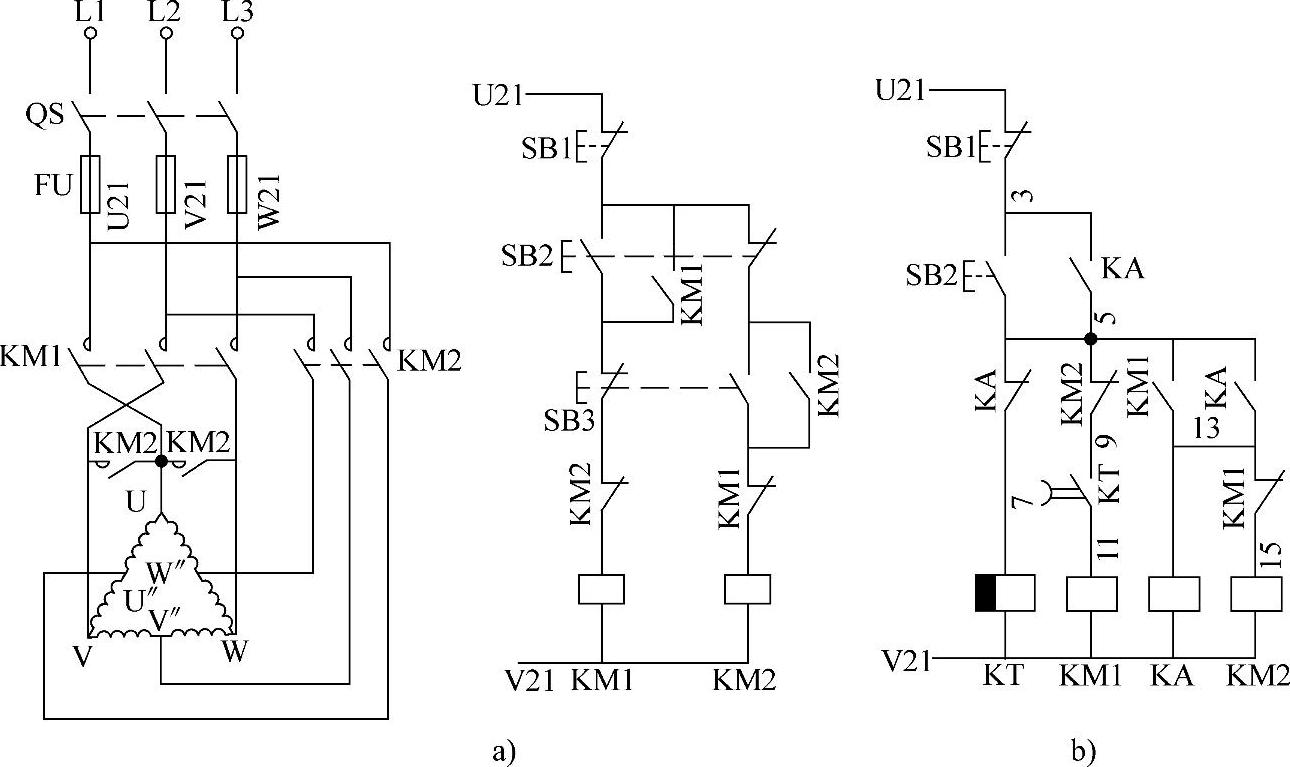
图1-23 双速电动机的控制电路
双速电动机的控制电路如图1-23所示。其工作原理(见图1-23a)是:先闭合电源开关QS,按下低速起动按钮SB2,接触器KM1通电吸合并自锁,电动机作△联结并以低速运行。如需要转换为高速运转,可以按下按钮SB3,接触器KM1线圈断电释放,同时接触器KM2通电吸合并自锁,电动机定子绕组作
 联结,并且电源的相序已改变,电动机以高速同方向旋转。
联结,并且电源的相序已改变,电动机以高速同方向旋转。
有时为了减少高速运行时的能耗,起动时电动机先按△联结低速起动,然后自动转为
 联结高速运行。这个过程可以用时间继电器来控制。工作原理(见图1-23b)是:按下按钮SB2时,时间继电器KT通电,其延时断开触头(9~11)瞬时闭合,接触器KM1因线圈通电而吸合,电动机定子绕组接成△起动。同时中间继电器KA通电吸合并自锁,使时间继电器KT断电,经过一断延时之后,KT(9~11)触头断开,接触器KM1断电,使接触器KM2通电,电动机便自动从△联结改变成
联结高速运行。这个过程可以用时间继电器来控制。工作原理(见图1-23b)是:按下按钮SB2时,时间继电器KT通电,其延时断开触头(9~11)瞬时闭合,接触器KM1因线圈通电而吸合,电动机定子绕组接成△起动。同时中间继电器KA通电吸合并自锁,使时间继电器KT断电,经过一断延时之后,KT(9~11)触头断开,接触器KM1断电,使接触器KM2通电,电动机便自动从△联结改变成
 联结运行,完成了自动加速过程。
联结运行,完成了自动加速过程。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。