



对智能摄像机的监控系统来说,关键是要求它能在长时间遮挡和短暂遮挡的情况下跟踪目标。传统上,参数运动模型,如匀速或匀加速度,与外观模型结合起来消除目标与模型之间对应关系的歧义。然而,随着遮挡时间的增加,外观模型和运动模型均容易发生明显的漂移。另外,当目标可选择任意路径时或当目标运动路径在遮挡期间受物理条件影响而发生改变时,参数运动模型通常不起作用,这些物理条件包括物理路径、门、交通灯。然而,当运动目标通过一个给定的场景区域时,我们给予足够的观察,那么这些交通模式和行为可以通过状态迁移模型p(X,Y,τ)[463]学习到,该状态迁移模型对目标的初始状态、最终状态(分别用X和Y表示)和迁移时间τ的联合概率进行编码。这种交通模式的模型能避免传统方法的不足,而且遮挡时间不长时,也非常有效,如人对人的遮挡,大型物体,如车辆,挡住了移动的小物体。
持续跟踪器试图找到接连出现的多个物体及其轨迹之间的对应关系。当目标的颜色分布与形状分布很相似或者目标与目标之间距离很接近时,这个任务很难完成。然而,假如给定训练后得到的状态迁移模型p(X,Y,τ),分层使用迁移密度能对最可能路径给予较大的权重。假设在时刻i,m个物体的观测值为Ω={ωi1,ω2i,…,ωmi},上次被观察的s个目标的预测状态为Θ={θi1,θ2i,…θsi}。我们一定能找到从集合Ωki,(1≤k≤m)到集合Θli(1≤l≤s)的映射函数。为了确定这个映射函数,我们采用参考文献[484]中提出的基于图论的算法,在该算法中,取每一组(l,k),对应Θli和Ωki的映射,边缘权重由估计位置θli和观察位置ωki之间的Mahalanobis距离给出。
在没有观测值时,该算法根据概率分布中的样本值得到完整的轨迹。图17.4的两个例子中,由于完全遮挡导致轨迹存在相当大的缺失部分,通过使用运动模型的参数跟踪算法得出轨迹,标出其中的错误轨迹。图17.4上面一行,跟踪器假设两个目标走向高尔夫车,然后返回到原来的位置,这个假设是错误的。通过学习后的模型来预测得到目标的位置,把它们连接起来形成正确的轨迹。图17.4b和c上面一行所示为根据这些样本加权平均得到的轨迹结果,两个轨迹分别清楚地显示出来。深灰色和浅灰色表示两个不同的轨迹,而黑色表明了轨迹被缝合连接的地方。图17.4的下面一行,说明了一个相似的例子,这个例子是卡车遮挡了摄像机的视线。这里卡车阻挡了摄像机的视场,完全使目标又被遮挡,再次使用学习模型成功地解决了遮挡问题。(https://www.xing528.com)
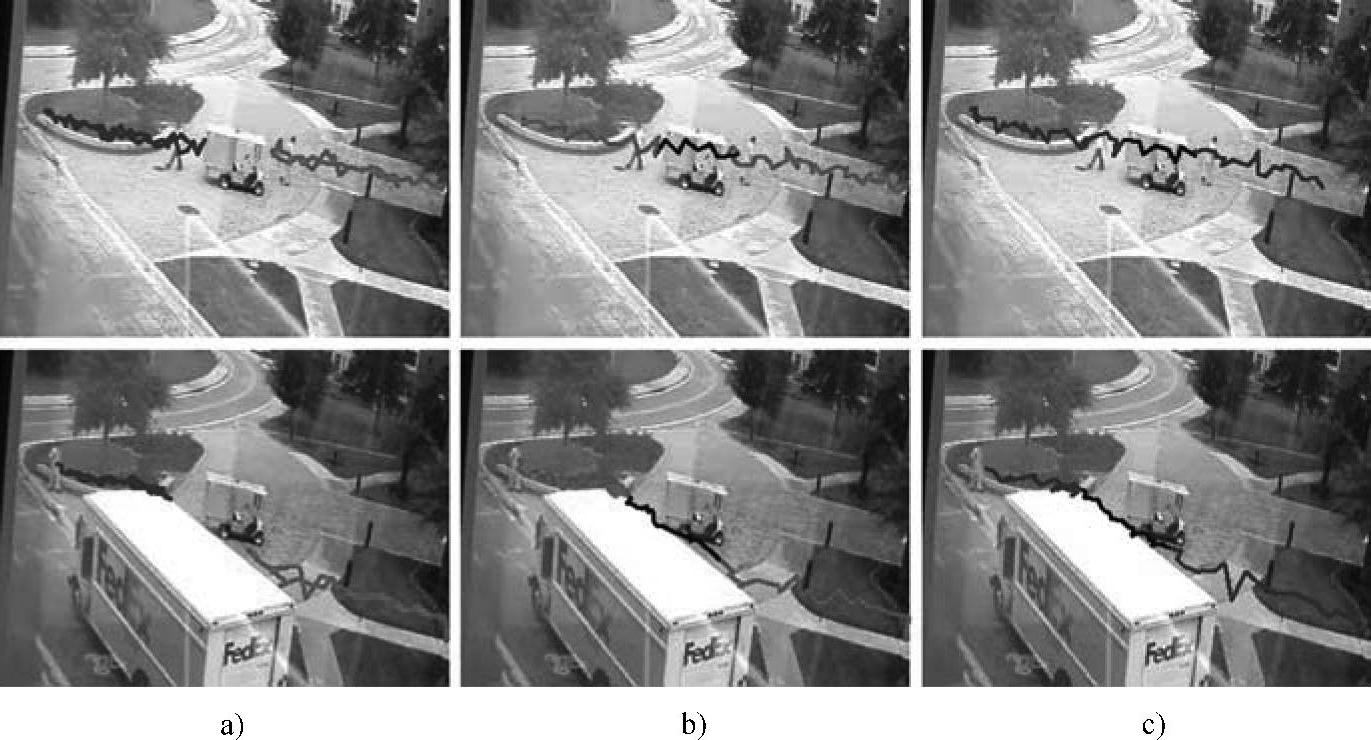
图17.4 每一列,a)用浅灰与深灰表示观测到的轨迹,该轨迹错误处已被标记。图b)与图c)用黑色表示轨迹被纠正的部分,用浅灰和深灰表示实际的轨迹
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。