



经过足够长时间学到的场景模型,如场景迁移模型[463]和目标属性模型(如图17.2)[441],可以对场景中目标的预期行为(或正常)进行编码。因而,这些模型也可以用来识别场景中的正常行为和异常现象,这是视觉监控系统令人满意的特性。当给定场景生成模型,异常检测算法通过对该模型采样,可以得到未来状态的预测值,而不使用跟踪器所显示的当前观测值。然后把预测轨迹与目标的实际测量值进行对比,计算它们之间的差值。例如,令目标的预测状态集为 ={θ1,θ2,…,θi+1}以及由跟踪算法观测到的实际测量集为Ω={ω1,ω2,…ωi}。那么,如果di>dth,则Ω代表的观测轨迹是异常的,其中
={θ1,θ2,…,θi+1}以及由跟踪算法观测到的实际测量集为Ω={ω1,ω2,…ωi}。那么,如果di>dth,则Ω代表的观测轨迹是异常的,其中

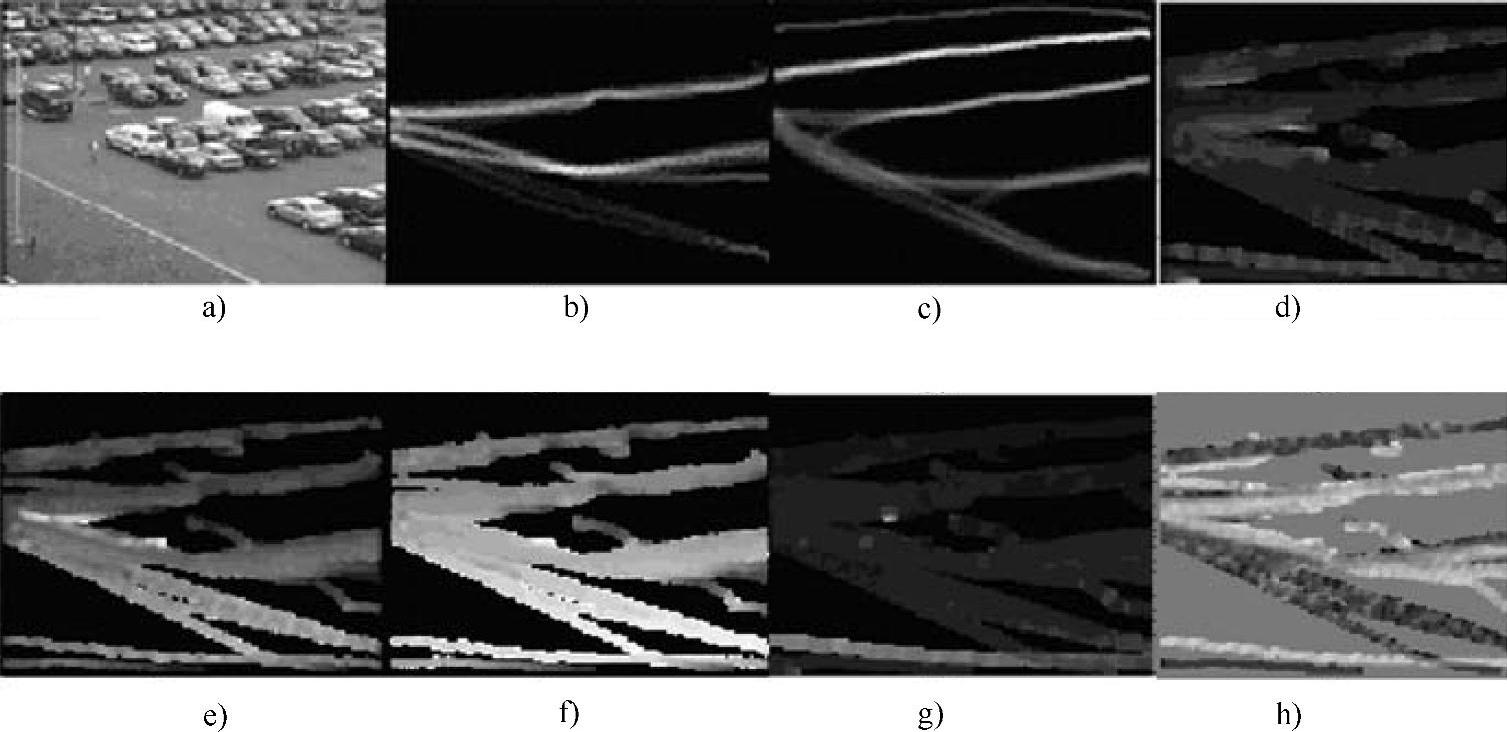
图17.2 在停车场场景下的目标属性模型(蓝色代表较小的值,红色代表着较高值)
a)停车场场景 b)场景中人的模型 c)场景中车辆的模型 d)人体宽度模型 e)人体高度模型 f)人体尺寸模型 g)人的行走速度模型 h)人的运动方向模型
x、y表示下一个所有可能(候选)状态,其协方差矩阵是∑Θ,n是以前状态的数量,且用于Mahalanobis距离的计算,而且dth是观测轨迹与预测轨迹之间的预定义最大差值。这种方法完全可以求得迁移序列,该序列明显不同于从状态迁移分布中得到的预测序列,而且在运动模式时,该方法很容易识别异常事件。使用该公式,能识别出在时空上与正常状态不一致的情况,例如,目标出现在非正常区域或者目标速度变化太大。n值的增加(公式17.3)有助于识别可疑行为,这种行为在时间或者空间上不一定是异常的,但是目标可能长时间存在于视场里,导致误差(实际路径与预测路径之间的距离)一直积累最终超过dth值。因此这种方法用于异常检测,能识别几种不同类型的异常行为。(https://www.xing528.com)
图17.3所示为上面所描述的异常检测算法的结果。图17.3a的上面一行中,一个人穿过路径走到草坪上。该算法把这个轨迹分成典型部分和非典型部分。图中所示的浅灰色轨迹是我们关心的轨迹,深灰色轨迹是根据观测值而预测的区域,当检测到异常时,黑色的点线为其预测轨迹。我们注意到只要是典型的行为,浅灰色轨迹跟深灰色轨迹非常接近。在模型学习时期,自卸挂车在不同的位置导致图17.3a中间图像的轨迹分类异常。图17.3a最下面一行所示为空间上不合逻辑的轨迹,穿过了通常无运动物体出现的区域。
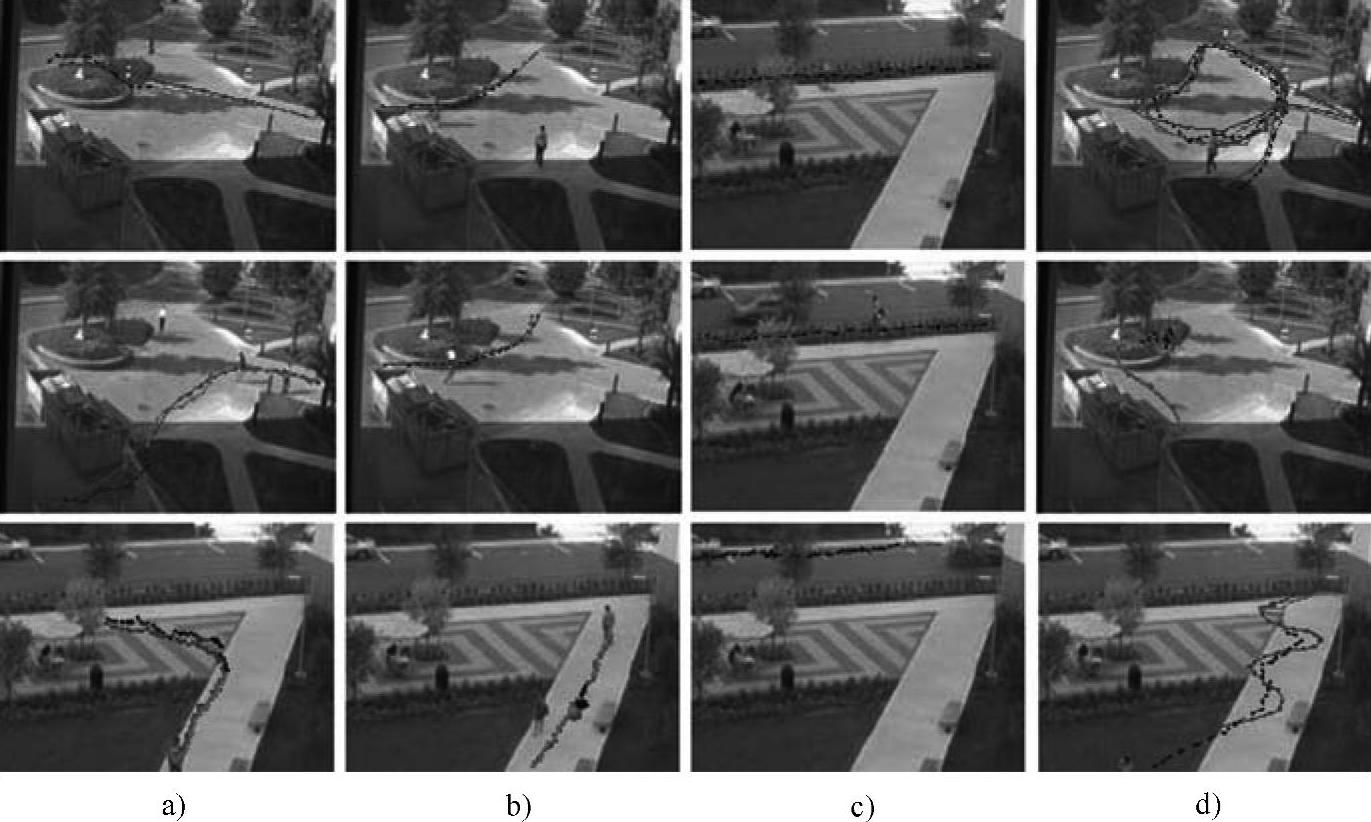
图17.3 异常检测的结果:a)为空间异常,b)和c)为时间异常,d)为可疑行为,由于它在空间和时间上的跨度较大。浅灰色轨迹代表实际(观测到)的轨迹。深灰色和黑色轨道分别对应于典型和非典型(异常)的预测路径
a)空间异常 b)时间异常 c)时间异常 d)可疑行为
图17.3b上面一行图像显示了一种异常行为,一个骑车的人以不寻常的速度穿过仅允许漫步的区域。图17.3b中间一行图像给出了另一种情况下的算法结果,图中,一个人在同样的区域跑步,而这个行为没有用于轨迹训练,因为通常没有人在这个区域内跑步。图17.3b下面一行所示为,一个人坐下来系鞋带的停止动作。图17.3c所示为第二种类型的异常(时间不一致),有三个不同的例子。第三列上面和中间一行所示为,两个人分别在滑冰与骑自行车,而最后一行所示为,一个人在汽车道上行走。由于图17.3b和c中目标的速度与训练时目标的平均速度有很大差异,因而与从跟踪器中得到实际测量值相比,预测值要么落后要么提前,导致所观察到的轨迹被标记为异常。图17.3d所示的三个例子为第三种类型的异常现象。图17.3d上面一行所示为,一个人在环路上慢走了几分钟。运动模式与训练得到的分布并不相悖,但是场景中目标长时间的存在导致误差累积,在公式(17.3)中用di表示,其中采用了较大的n值,然后最终大到超出dth,将导致序列的分类为异常。图17.3d中间一行显示了一个人在座位区域跳跃的动作。这个人即使没有在现场呆很长时间,由于他的行为与训练样本不一致,误差di很快变得很大。下面一行所示为,一个人以锯齿模式行走,这种模式之前没有发生过,导致轨迹分类为异常。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。