



工业自动化能促进生产力的提高以及竞争力的增强。机器视觉是该自动化的重要推动者。机器视觉和智能摄像机的终端用户行业包括制造业,机器人,半导体,电子产品,制药业,医疗成像设备,食品业,包装业,印刷业,以及造纸业。摄像机执行的典型任务可以分为三大类:质量控制、代码和目标识别以及过程监视和控制,简要介绍如下:
①质量控制。基于探伤检查的质量控制可能是智能摄像机在机器视觉中最广泛使用的应用。典型任务包括零件属性检查,如形状、颜色以及纹理;表面检查;完整性检查;物理尺寸的测量;位置检查(例如,确定目标的位置/或方向来引导机器人手臂)。
②代码和目标识别,例如按照一维或二维的方式读取字符、解密矩阵码以及校验标签。这通常被称为OCR(光学字符识别)和OCV(光学字符验证)。
③过程监视和控制。这类任务类似于视频监控。它们包括零件计数,零件分类,以及不存在/存在检测。
通常,这些分类和任务在现实世界的应用是混合的。许多任务依赖于相同或相似的计算机视觉技术。例如,对这些任务中的很多来说,基于特征提取和模板匹配的目标识别是项必要的技术。(https://www.xing528.com)
图16.1所示为一个简化的自动零件分拣系统,它安装在智能摄像机上。流程图的设计得益于参考文献[96]。在这个例子中,根据苹果的体积,系统自动将它们分为大与小。该系统的基本组成部分包括智能摄像机、照明系统、机器人手臂以及控制子系统,它能与摄像机进行通信,系统通过移动的传送带,把苹果提供给摄像机和机器人手臂,然后把分好的苹果存储到容器中。照明系统给这些苹果提供理想的照明。智能摄像机给每个苹果拍照,一次一个,速度与皮带的速度相同。摄像机内的智能图像处理算法把苹果从图片中分割出来,提取其轮廓,并计算其大小。然后,把它的体积与预先定义的阈值进行比较,判断被检查的苹果是大还是小。苹果按其体积分类一旦完成,适当的控制信号发送到机器人手臂的控制单元(这个控制信号可以简单到1比特,用“1”代表“大”,“0”代表“小”)。使用简单的查找表,该控制单元可以确定机器人手臂相对传送带的位置与角度,使它能把检查的苹果放到适当的存储容器中。
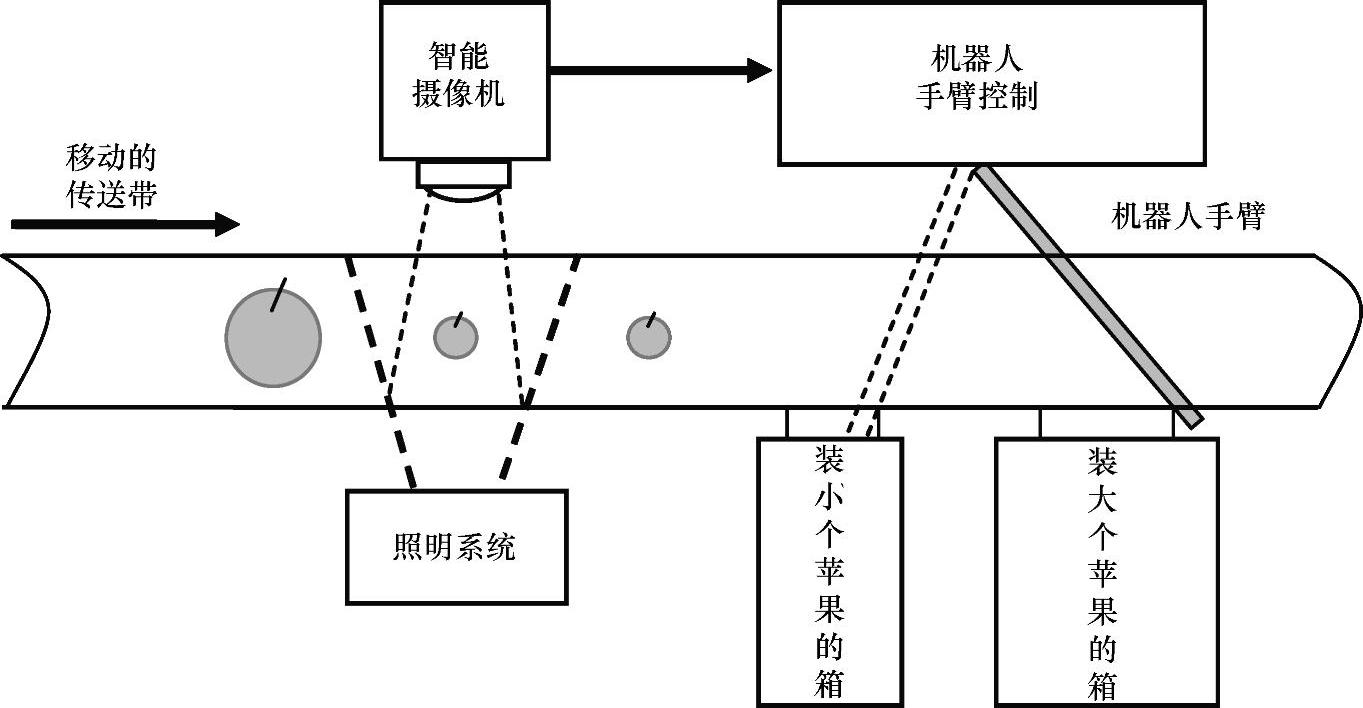
图16.1 使用智能摄像机的自动零件分拣系统的实例
最近,我们已经看到包括智能摄像机在内的许多机器视觉系统,已经从传统的应用领域扩展到其他具有挑战性的应用领域,如汽车业,监控和安全领域以及交通流的信息采集。这些是摄像机走向成熟的标志。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。