



通过已经设计了几个实验,对所提出的架构在地面测试图上定位移动目标的性能进行评估。通过一对静态和PTZ摄像机获取了停车场图像序列。将行人当作目标,各种车辆当作遮挡。改变PTZ摄像机的变焦设置,可获得各种情况下的结果,例如,目标被遮挡和未被遮挡。本小节我们通过实验研究,主要讨论两个不同的问题。首先,给出了一些由不同变焦设置时所获取图像对的校正和定位结果。这些结果说明,与直接校正异质图像对相比,同质变换后的图像对的校正更加准确。与标准单目摄像机定位相比,所提出架构的定位准确度更有优越性。
图15.4显示了使用两组不同的图像进行校正和定位的结果。这两组图像是由静态和PTZ摄像机在不同的变焦设置下获取的。第一行给出了两组不同的异质图像对。第二行是它们同质变换后的图像。第三行和第四行分别给出了校正的异质图像对和校正的同质图像对。计算校正误差的准则是校正后图像对的极线间垂直距离的平均值。左边的图像对在被转换成同质图像对后,再进行校正,其误差由0.53像素降低到0.06像素。右边的图像对,误差由0.79像素降低到0.07像素。当这些图像对在被转换成同质图像对后,再进行校正,其畸变误差也降低了(如图15.4)。表15.1所示为不同焦距比值时的校正误差。
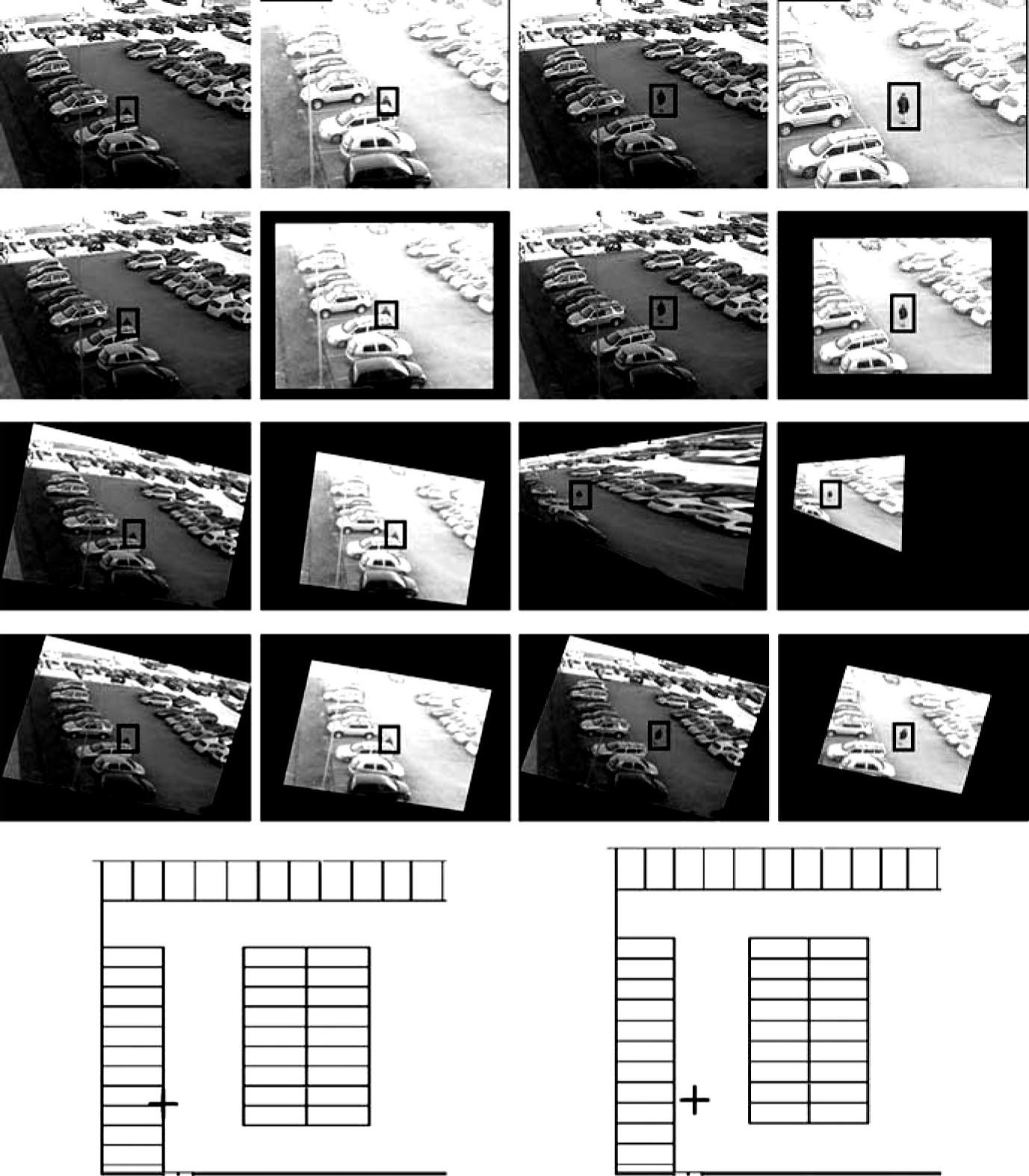
图15.4 基于异质图像对的目标校正和定位
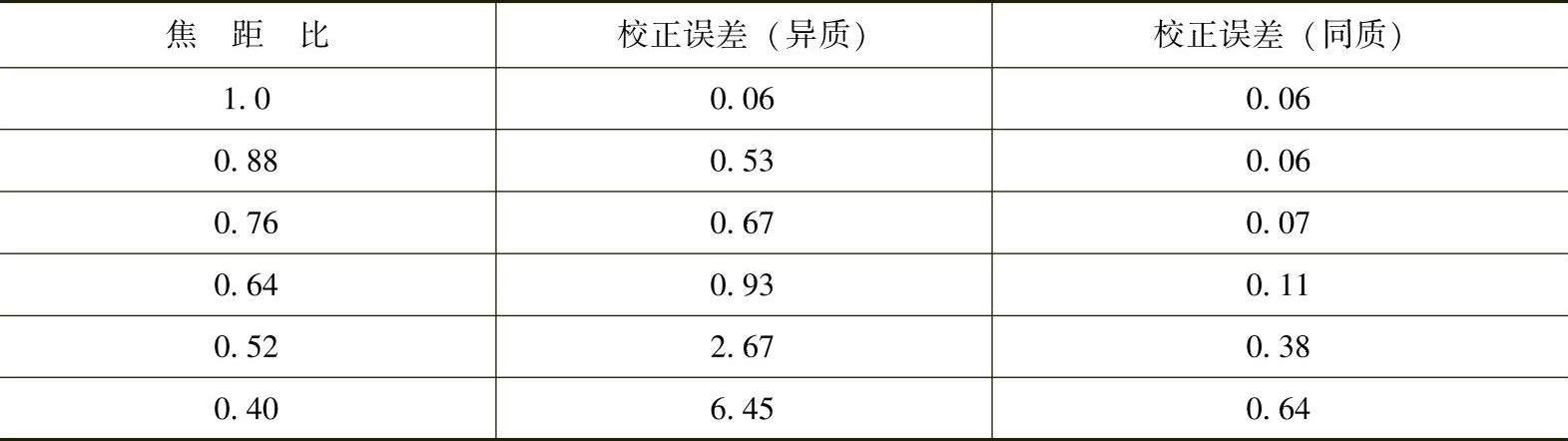
表15.1 在不同焦距比下,异质和同质图像对的校正误差
在第二组实验中,在平移/倾斜/缩放的不同设置下获取了三个图像序列,并对被遮挡的目标进行定位。图15.5为三幅图像中移动目标的定位结果。图15.5清晰地表明,甚至在遮挡情况下,所提出的算法也能够对目标进行准确的协作定位。而且,和基于单目摄像机的机制相比,所提出的基于立体视觉机制的定位性能更好。(https://www.xing528.com)
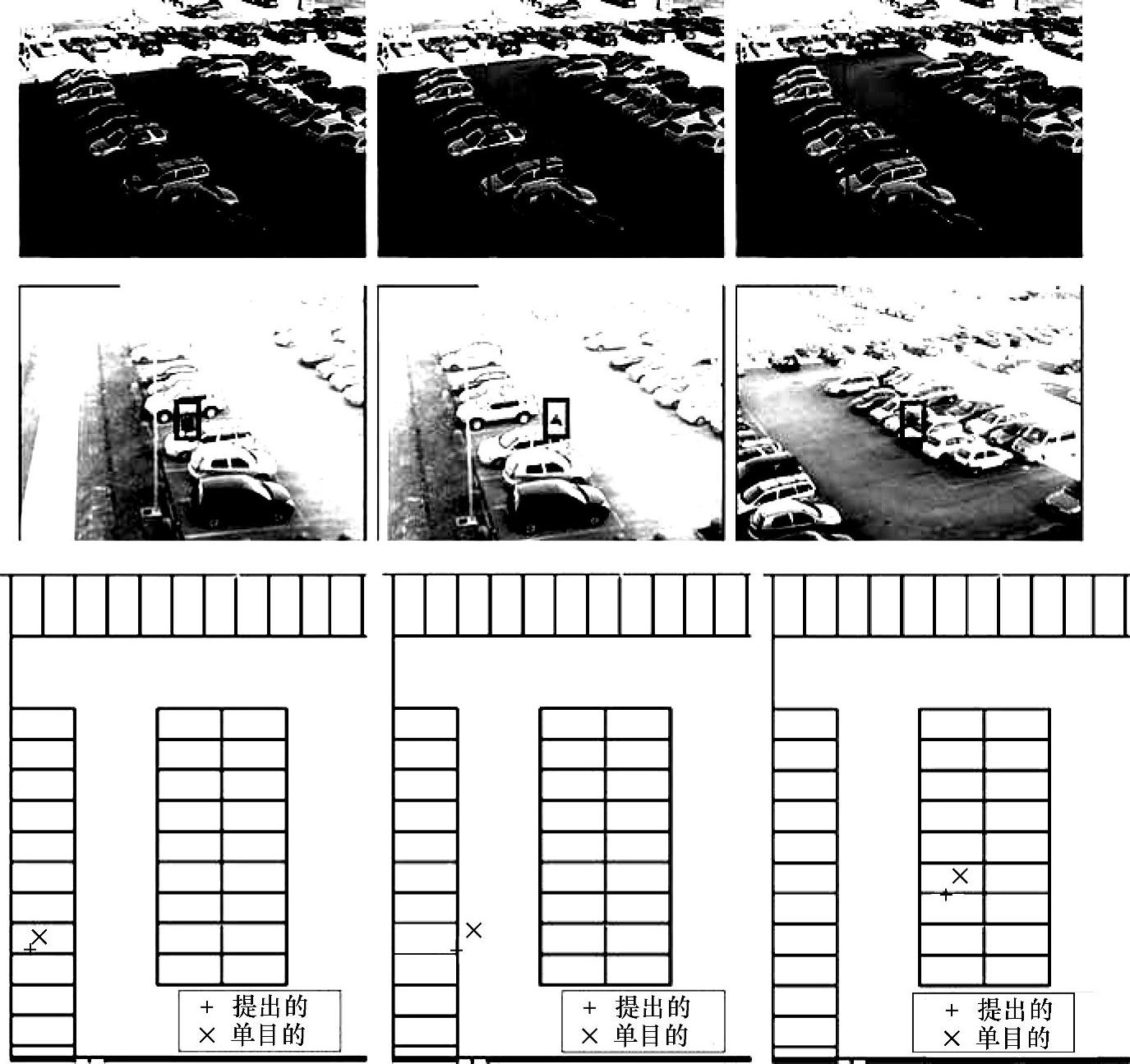
图15.5 利用三组不同的图像,对所提出的算法与标准的单目摄像机定位技术进行比较。静态摄像机获取的图像(顶行),PTZ摄像机获取的图像(中间行),测试图上的定位(底行)
图15.6中,利用移动目标的跟踪轨迹,对所提出的架构和基于标准单目摄像机的技术进行了比较。当目标被遮挡时,和基于标准单目摄像机的技术相比,本架构得到的跟踪轨迹更加准确。然而,在目标未被遮挡时,它们的轨迹互相重叠。曲面图也说明,我们提出的架构比标准单目摄像机的定位技术更具优越性。图中,x轴表示遮挡物的高度,y轴表示移动目标沿着光轴方向离静态摄像机的距离。误差准则被定义为目标的实际位置(地面真实值)和其计算定位之间的距离。在基于单目摄像机机制时,无论是物体离摄像机的距离增大还是遮挡物的高度增大,误差都会增大。而利用所提出的算法,误差几乎是不变的,并不随着遮挡物的高度或者物体离摄像机的距离而变化。
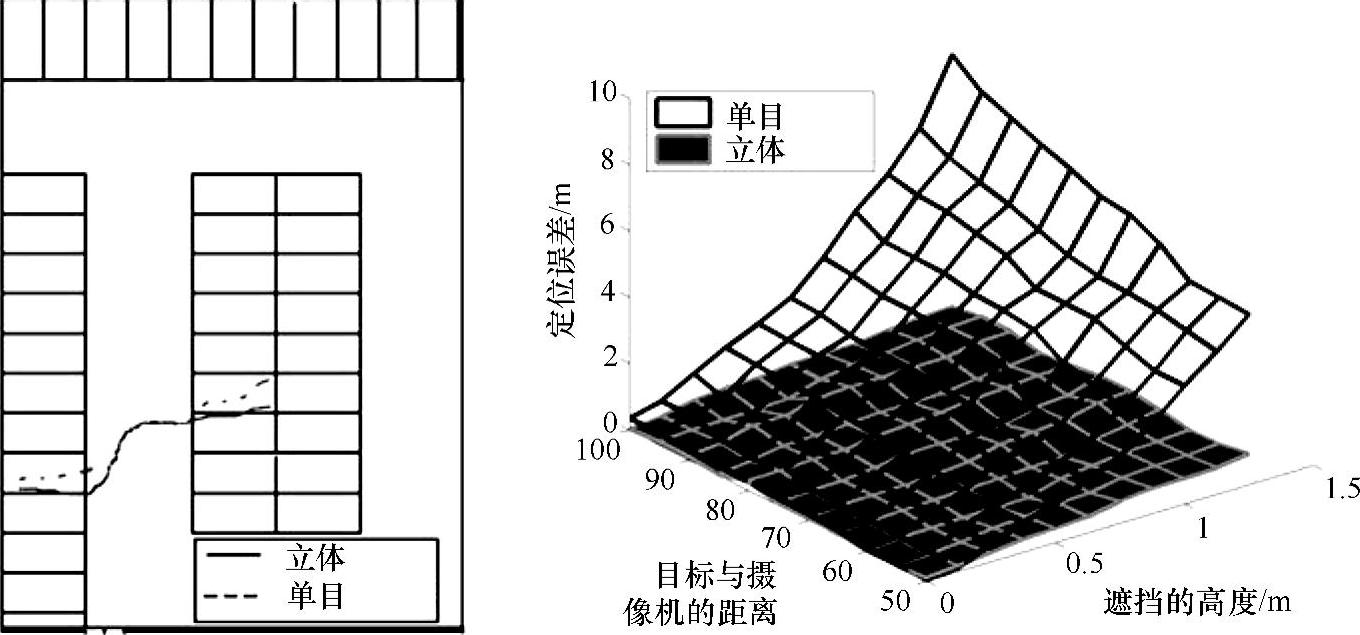
图15.6 分别利用所提出的算法和基于标准单目摄像机的技术对移动目标进行跟踪,所得到的跟踪轨迹如左图所示;右图所示,横坐标相应于遮挡物的高度、目标与静态摄像机之间的距离,纵坐标表示两种算法的定位误差
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。