



【摘要】:本节就大型智能摄像机和传感网的特点,举例说明了系统开发所面临的挑战。目前该网络主要应用在公共监控中,尤其是人群密度估计。如图14.1所示,摄像机的输出是一个运动和密度信息的矢量场,并被映射在GM上。图14.2显示了,在预定义的ROI中,对智能摄像机进行组合的情况。在图14.2中,我们能明显地看出系统的复杂度,因此全局的应用开发主要取决于GM,而并不直接涉及单独的智能摄像机或者传感器的输入。
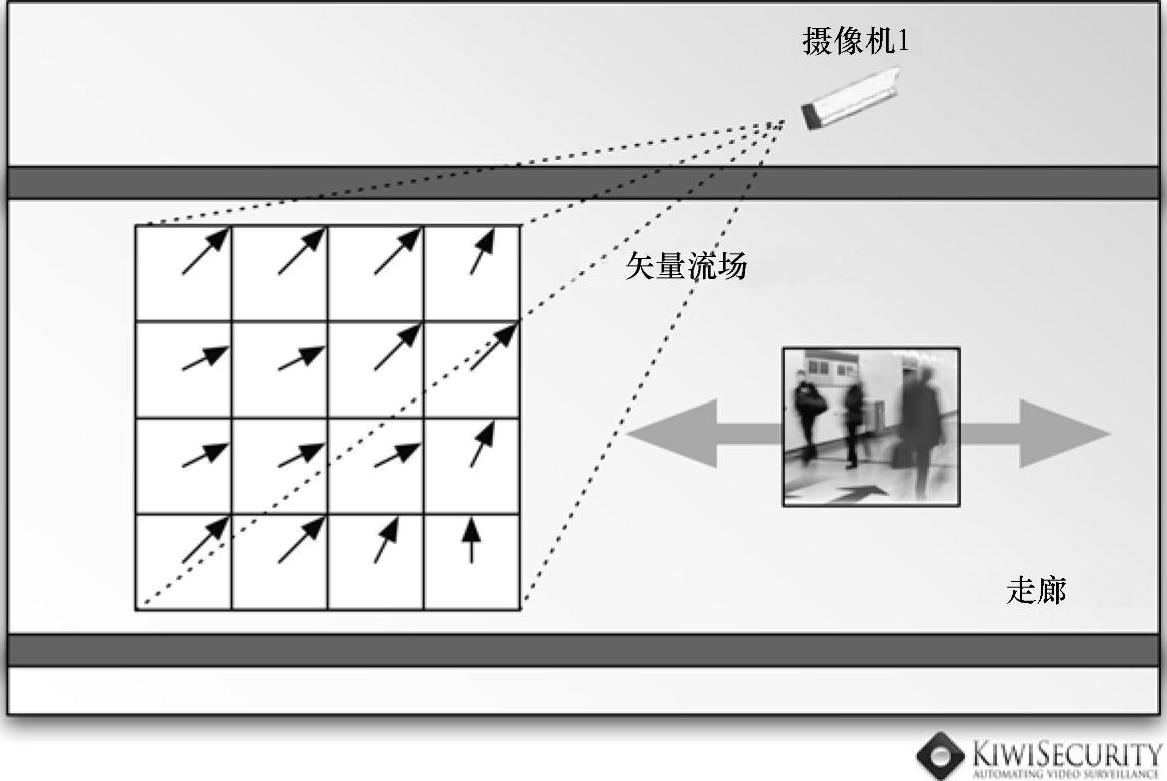
本节就大型智能摄像机和传感网的特点,举例说明了系统开发所面临的挑战。目前该网络主要应用在公共监控中,尤其是人群密度估计。机场的战略安全规划中就应用了这种人群密度估计。机场中安装了大约700台摄像机,它们通过光纤网络被连接到中央控制室(CCR)。监控系统基于一个定义了感兴趣区域(ROIs)的全局模型(GM),包括感兴趣区域(ROIs)内智能摄像机和其他传感器的定位。摄像机能独立完成自校准(第9章)、流控制和密度估计以及干扰检测。如图14.1所示,摄像机的输出是一个运动和密度信息的矢量场,并被映射在GM(全局模型)上。
在这种高安全性应用中,既利用了摄像机内的干扰检测技术也利用了全局干扰检测。摄像机内的干扰检测技术用于检测摄像机是否发生了移动,或者它的视场是否被遮挡,比如:摄像机被覆盖、镜头上喷洒了东西或雾气遮挡。这些信息被发送到的CCR(中央控制室)。全局干扰检测技术使用GM(全局模型)来完成干扰的高级推理。在干扰数据集中融合后,按照摄像机的实际位置利用高级推理来得到不同摄像机所获取内容之间的关联性。如果两个相邻的户外摄像机均检测到雾,则有很大的可能性是真正的雾,但是如果只有其中一个检测到雾,则可能是干扰。图14.2显示了,在预定义的ROI中,对智能摄像机进行组合的情况。
在图14.2中,我们能明显地看出系统的复杂度,因此全局的应用开发主要取决于GM(全局模型),而并不直接涉及单独的智能摄像机或者传感器的输入。
 (https://www.xing528.com)
(https://www.xing528.com)
图14.1 某一个摄像机内所产生的运动和密度信息的矢量场
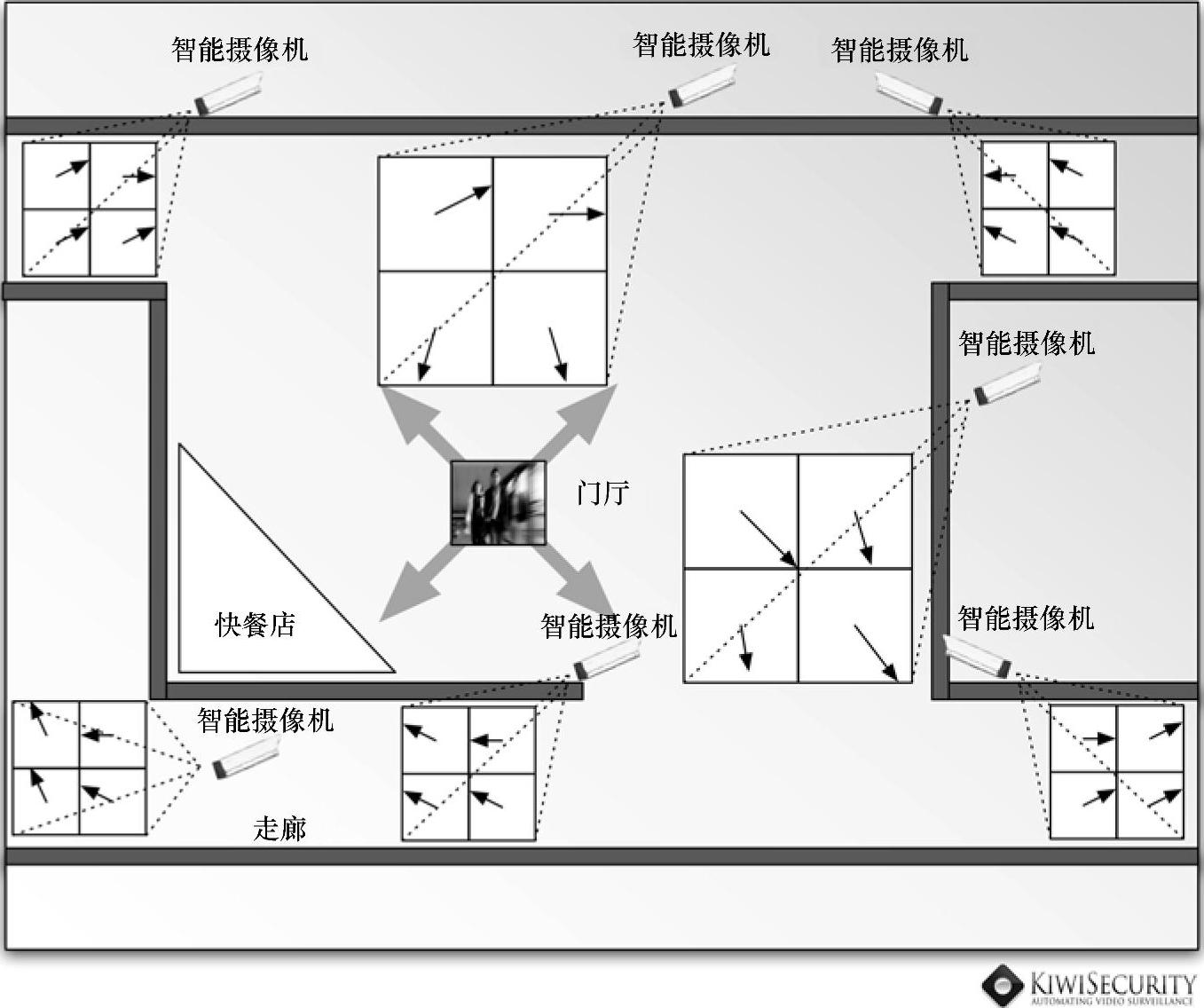
图14.2 某个ROI中的n个摄像机所产生的运动和密度信息的矢量场
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。