



飞利浦和NXP研究组开发的诸多方案,已经应用在了当前的无线智能摄像机上。分层通信协议是在该平台上测试过的方案之一,它的发展实现了不同摄像机处理器之间的直接通信[332]。成像侧,为了使误检测率最小化,将不同图像传感器的检测结果融合后,进行分布式人脸检测的映射[264]。而且演示了基于手部检测的姿态识别的首批方案。对非系统安装的摄像机,我们研究的摄像机标定技术[499]实现了准确的分布式处理。所有方案均实时运行在分布式无线智能摄像机系统上(视频24或30帧/s)。为了调试,将LCD(液晶显示屏)连接到摄像机,从而显示视频路径。本节中的图像取自液晶显示屏。图像处理部分的功耗由处理器的负载所决定,一般大约是50~250mW。以下描述的算法例子是应用的核心部分。
为了控制WiCa,我们在主机上运行WiCaEnv程序。若该程序通过UART(串口)被直接连接到WiCa,它将模拟一个ASCI终端。如果连接到Aquis Grain USB棒,它将向网络上所有可用的WiCa提交请求,并构建列表。人们通过列表选择一个WiCa便可建立到特定摄像机的无线终端。随后,WiCaEnv将用于控制DPRAM,将程序上传到IC3D和8051,建立传感器和IC3D参数,并上传/下载内容到/从DPRAM。
背景减除是一种机制,它用于检测固定摄像机给定帧序列的所有前景目标。其中,背景图像必须适应光照的渐变和突变,运动变化,摄像机振动,传感器的灵敏度等。有许多不同的背景技术,例如运行期均值法,混合高斯法,内核密度估计法,或特征背景法。将DPRAM作为存储区,根据背景数对分辨率进行折中便可实现中低规模存储需求的所有背景技术。图12.12为背景减除的应用。这种应用进行轮廓检测,其结果将作为基于模糊边缘的人脸识别系统的一个输入[264]。在识别出眼睛的部位用水平条标出。近来目标识别的轮廓和曲率匹配方面的研究很多。在SIMD上实现多尺度匹配过程,使该过程可以实时进行[491]。要实现实时屏幕旋转或变换,必须为每一个像素单独分配地址。由于SIMD上对整个视频行的所有操作相似,因此该任务在SIMD上不容易实现。但通过使用外部DPRAM,WiCa结构将能够执行基于图像宽的操作。该RAM的地址总线被连接到IC3D的数据输出端。任何图像变换运算,均能按像素地址逐行编写为SIMD指令,从而可以高效地实现。

图12.12 利用背景减除法来识别摄像机前面的人的轮廓,这些轮廓将作为眼睛识别应用的输入,图中用水平条标出的部位为眼睛
图12.13是执行x轴(倾斜)旋转程序的截屏。该程序基于射影变换是齐次坐标的非奇异线性变换。它显示屏幕中心的旋转轴在-36°和+36°(HW限)之间的倾斜。并且应用在车道检测预警系统以及立体深度估计的摄像机校准中。图12.14是对输入图像进行边缘检测(罗伯特交叉算子)后得到的一幅二值图像。屏幕顶部的霍夫空间由互相垂直的线显示。应用WiCaEnv,能够将霍夫空间保存到DPRAM、利用8051扫描霍夫空间,并且找到图像内的三条显著线。然后将这些信息保存到IC3D中。利用IC3D可以在显示器上画线(显示为灰色覆盖)表明已发现线的地方。脚注[1]和[2]链接的视频演示为结果和方法改进。参考文献[232]说明了该方法本身。
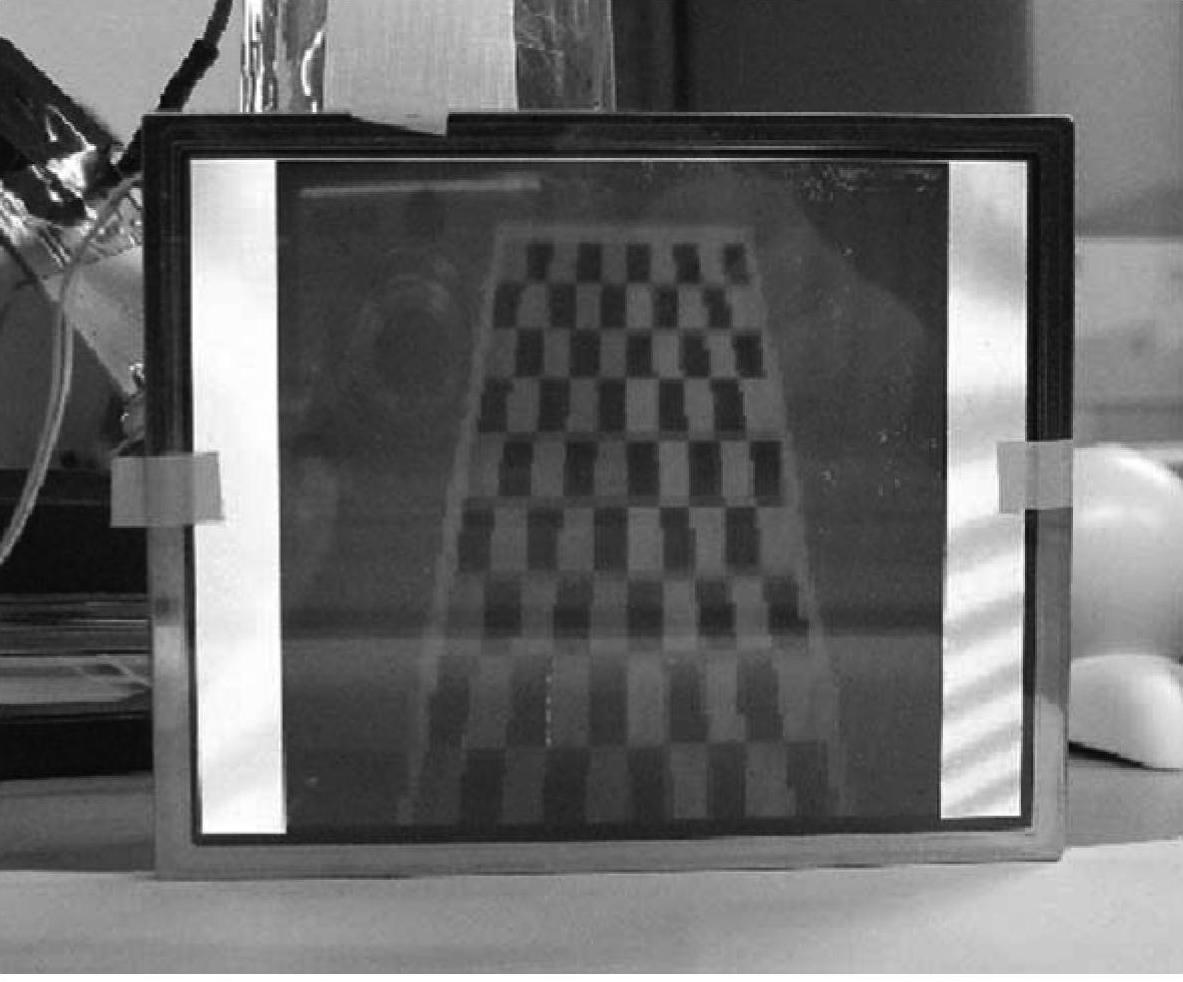
图12.13 通过在SIMD模式下处理地址数据,利用一些操作可以按照视频速度对图像进行仿射变换(https://www.xing528.com)
图12.15是基于背景减除方法的一种应用。首先将背景保存在内存中,用于后续帧的背景减除。然后通过阈值得到差值图像的二值图像。只有产生差异的前三行被保存到内存中。例如以这种方式识别手指顶部可以产生一个人机接口。下图显示了如何画一幅图像。显示在屏幕上方的颜色条用于改变绘图的颜色。仅仅通过点击就可以选择所需的颜色。视频[3]中所示为实时手指识别的另一个示例,其方法为融合边缘密度,运动矢量和及其强度以及彩色信息来实现实时手部跟踪。现场引入更多的摄像机使得鲁棒的姿态识别技术领域得到发展。基于单摄像机的姿态识别结果不具有鲁棒性[575]。然而,在该过程中引进更多的摄像机,已获得了显著效果。另外,在协作方式下,每个摄像机进行姿态分析并且将得到的二维结果发送到同一个中心,经卡尔曼滤波器获得三维结果。有关论文见参考文献[576,601]。视频演示见脚注[4]和[5]。
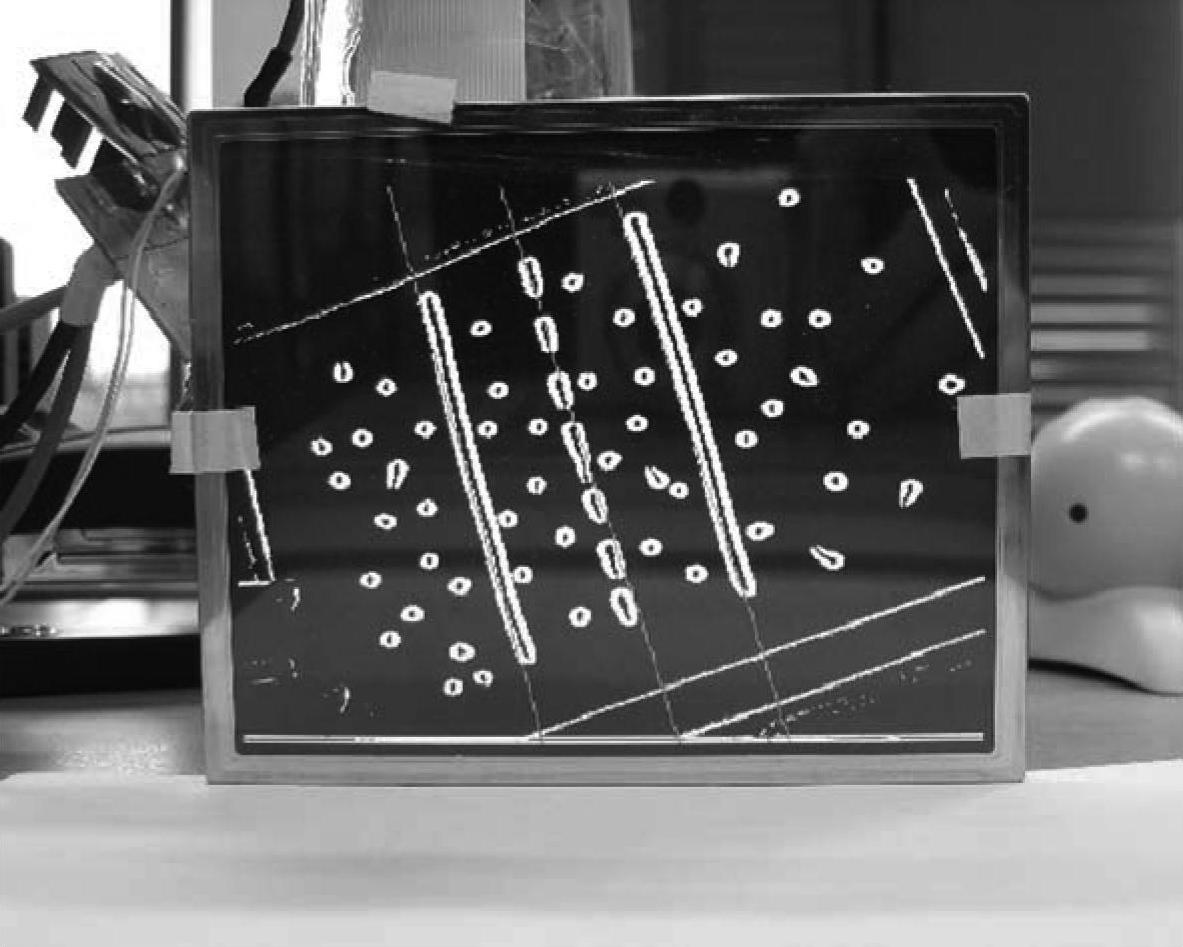
图12.14 在图像上部可以看到霍夫空间,产生了三条明显的标注竖线
最主要的任务,例如立体化深度估计,本质上也是协同摄像机任务。然而,在该方法中,为便于协同工作,传感器之间非常靠近且具有很高的内部带宽。研究结果见参考文献[209,210],后一篇文献中也涉及了摄像机自动校准。深度估计的视频演示见脚注。[6][7][8]
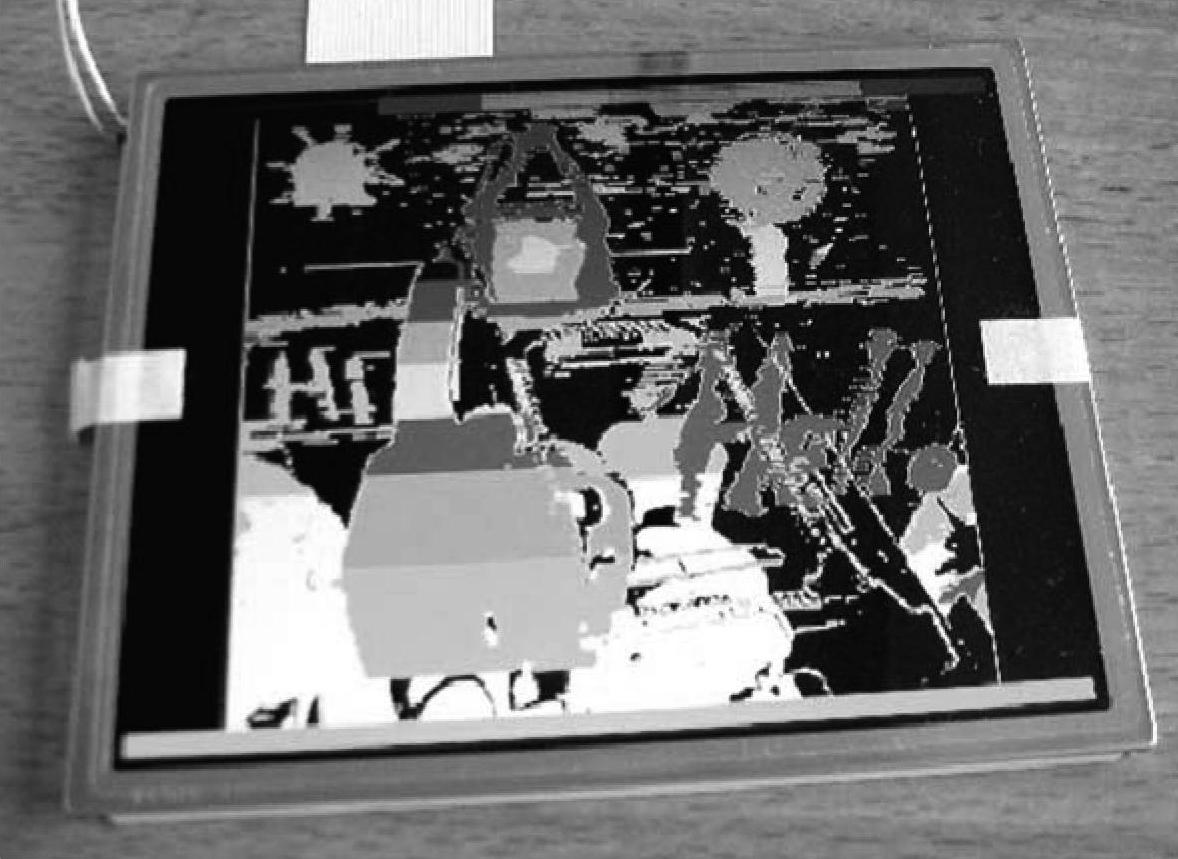
图12.15 该应用为一种用户接口装置。该装置可以识别出手指,从而通过手指 进行选择菜单和画画可以进行演示。图中所示为通过该装置所做的一幅画
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。