



网络系统摄像机通常用于监控。它们主要用来检测人物,并报告异常情况。复杂环境中对(自然)物体的检测比较困难。格拉茨大学的智能组利用智能网络摄像机来实现交通监控[76]。另外,在MIT媒体实验室的“眼睛社会”项目中与摄像机无线连接的掌上电脑实现了分布式识别任务的执行[353]。此外,普林斯顿大学(Princeton University)嵌入式系统组进行了智能摄像机网络中的分布式处理研究,它应用于对象跟踪并且有指导意义。
就二维(图像传感器)拍摄场景中获取三维(世界)对象而言,上述技术还存在一些挑战。对象相对摄像机的取向不同时,它们的定位,旋转和形状也将不同。当场景中的对象被部分遮挡时仍然需要检测。此外,场景的照明条件在非受控的情况下是不可靠的,色彩将受到照明条件和明暗度的影响。这些实际的问题需要三维多摄像头技术和图像分析领域的一些特殊方法,使得角度和照度变化的观察具有鲁棒性。
从不同角度观察相似的物体,为了能区别外观的不同,选择基于特征的方法是合适的,并且该方法能兼顾硬件低功耗的要求。当处理自然场景中的物体时,该方法的性能较高。原因是物体的特征具有尺度,旋转,色彩和强度不变性。使用该技术时,首先要从图像中检测特征。这些特征的形式可以很简单,如颜色组合、角或边缘块,也可以比较复杂,如Haar滤波器[266],Gabor滤波器的响应,以及常用的基于SiFT的斑点特征[337]。图12.10是一幅角检测图像,彩色部分表示角的位置和类型。从检测实际的角到标记其位置和类型之间存在流水线的延迟。角检测在31×31的过滤器中进行。列出角的类型和局部梯度信息就足以从几十张其他图像中识别出目标图像。角检测应用在很多方面,如建筑物、墙壁和家具等人造结构的结构查询,以及姿态分析。如图12.11所示为斑点特征(参考文献[329])。根据特征本身的位置,将它周围的点与数据库系统进行匹配,从而得到该特征的描述。该数据库系统可以从存储集合中识别出特定的特征。

图12.10 角检测是识别人造物体的一种简单方法,图中所示为交通标志识别项目的截屏(https://www.xing528.com)
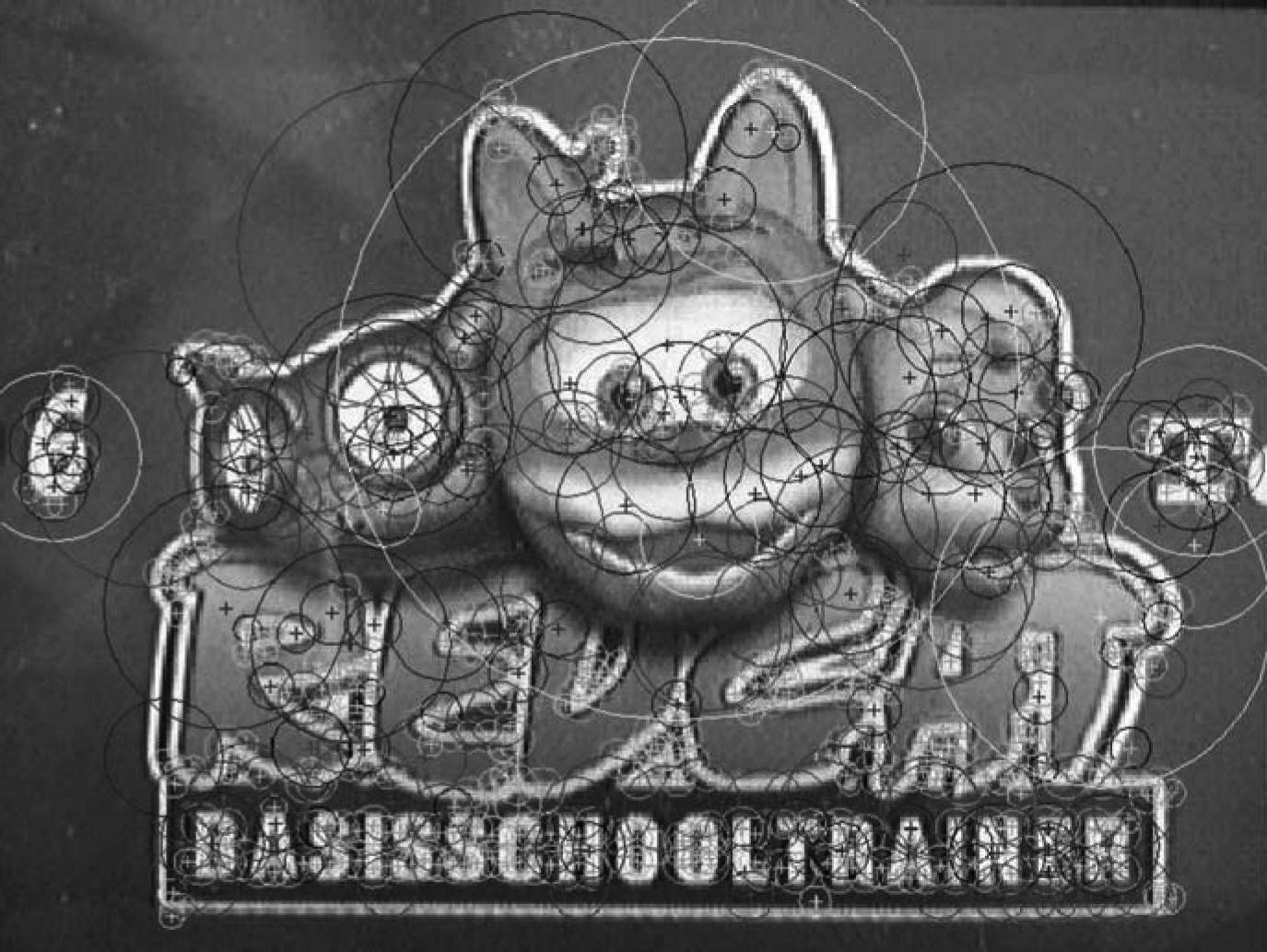
图12.11 对自然物体而言,斑点特征法前景较好。在图中,标注圈的大小和亮度表明了斑点最易出现的范围
基于特征的技术其主要优点为,算法可以明显地划分为像素并行部分和任务并行部分。其中,实际的特征查询将对所有像素执行相同的任务,因此它是像素并行部分,而分析部分则是通过对检测到的任意(未知)数量的特征点进行处理,从而实现任务并行部分。
在我们的模型中,IC3D查询视频中的特征点,并将这些特征点写入到双端口RAM。8051以自身速度从RAM中检索出这些特征点,并将它们与内部数据库比较,或者将两个摄像机的特征点进行比较。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。