



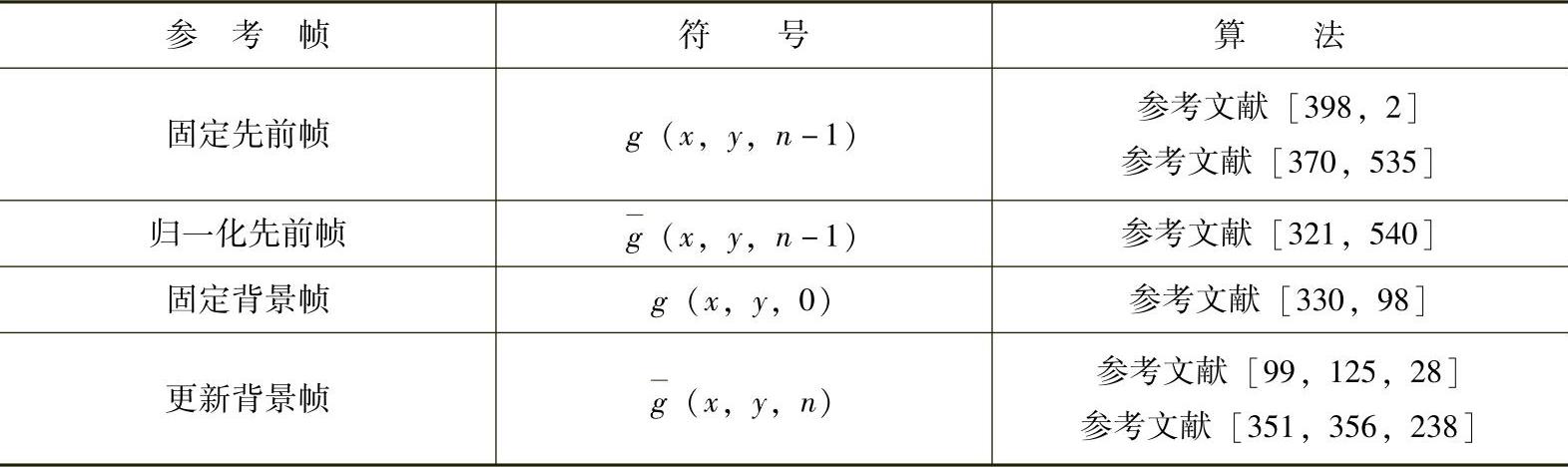
为了检测重大变化,当前帧g(x,y,n)的特征相当于是参考帧g(x,y,r)的特征。在变化检测中,参考图像的选择是非常重要的。参考帧可能是序列中的先前帧或一幅代表场景背景的图像。背景帧可以是固定的或是定期更新的。在前一种情况下,通常一个帧取自序列(例如,第一帧[330,98])。在后一种情况下,使用了先前帧[99]的时空信息。表10.2总结了选择参考帧的不同方法。
许多变化检测技术使用先前帧作为参考帧[308,2,370,535]:
t(x,y,n)=τ(g(x,y,n),g(x,y,n-1)) (10.15)

图10.3 使用滑动窗实现不同尺度的变换检测。左:不重叠窗口。右:重叠窗口
表10.2 变化检测中选择一个参考帧的不同方法
这些方法具有减少阴影检测的优点。另外,这种方法也检测了实际中并不需要的移动物体露出的背景。此外,这种方法无法检测到物体的低纹理移动区域。在某些情况下,先前帧g(x,y,n-1)在对比之前已经归一化了。数据归一化用来减少或归一化由于不同灯光或气候状况而造成的场景变化。在比较前,归一化的先前帧g(x,y,r)=g(x,y,n-1)被创建在区域层次。归一化是通过二阶统计[321,540]来实现的。当前图像与参考图像的各区域W的方差和平均值,(σ2n,μn)和(σ2r,μr)分别用来补偿不同的光照。下面的变换应用于图像的各区域W:
 (https://www.xing528.com)
(https://www.xing528.com)
如果公式(10.16)解释为一个滤波器,σ2r/σ2n和μn分别是滤波器正规化先前帧g(x,y,r)=g(x,y,n-1)的增益和偏移量。正规化后,灰度级分布在具有相同均值和方差的两幅图像的相应区域。
另一种可选择的方法是在变化检测中使用背景帧作为参考帧。这种方法假设在开始捕获序列时,没有出现前景目标。通常选序列的第一帧作为参考帧:
t(x,y,n)=τ(g(x,y,n),g(x,y,0)) (10.17)
这种方法可以检测场景中的目标,即使目标变得静止也可以简单地检测出来。另外,这种方法减少了背景显露区的影响并且提高了低纹理移动物体的检测。
然而,这种解决方法并不总能符合实际情况。在实际中很难得到没有前景目标的初始帧。而且,对长户外序列,规定这样一个参考帧是不合适的,因为在这种情况下,照明条件逐渐改变,而这种方法并不能适应这些变化。
针对以上分析,参考文献[99,125,28,351,356,238]提出了把序列中后续图像的背景信息综合起来重建参考帧的技术,这种解决方法可以记忆变化检测过程以便产生一个更新后的背景。通过时间滤波器整合序列中过去帧的信息来实现这种方法。这个过程允许我们计算没有运动物体的当前帧的预测值。用更新后的背景和当前帧做对比来检测变化。背景图像g(x,y,r)=g~(x,y,n)由过去帧的加权平均生成:

这里, 且0<α<1。根据图像序列中像素在时间窗口中的统计值来更新参考帧是一种有效的方法[238]。在这种情况下α的值是自适应的。在简单的方法中,α是常数。即使是不变的像素最终也会更新[356]。虽然无法得到没有前景目标的帧,但是更新的过程会产生一个背景帧。此外,这样一个更新的参考帧可以用来补偿室外场景在照明和天气条件下的缓慢变化。另外,这种方法克服了背景覆盖和背景显露的问题。然而,这种方法受到移动物体投影的影响。这个缺点的解决将在第10.5节中讨论。
且0<α<1。根据图像序列中像素在时间窗口中的统计值来更新参考帧是一种有效的方法[238]。在这种情况下α的值是自适应的。在简单的方法中,α是常数。即使是不变的像素最终也会更新[356]。虽然无法得到没有前景目标的帧,但是更新的过程会产生一个背景帧。此外,这样一个更新的参考帧可以用来补偿室外场景在照明和天气条件下的缓慢变化。另外,这种方法克服了背景覆盖和背景显露的问题。然而,这种方法受到移动物体投影的影响。这个缺点的解决将在第10.5节中讨论。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。