



变化检测是诸如视频监视器,智能家居、互动和拟真游戏等视觉基础应用中重要的一步。特别地,变化检测是智能摄像机应用的一个预处理步骤,它减少了后面模块所要分析的信息数量和分布式智能摄像机设置所要交换的信息数量。决定于应用、可用的计算能力和需要的准确性,一个变化检测算法的复杂性将会多种多样。
变化检测算法的基本要求是物体轮廓检测的准确性(空间准确性)和时间稳定性(时间一致性)。再者,在变化检测算法中敏感度和鲁棒性也是期望考察的特性。敏感度是检测小量级变化的能力。鲁棒性则被视作一种能否在多变环境下提供好的准确性的特性,如光度变化。其他要求决定于应用情况,会在应用中介绍。举例来说,如果这种性能以检测过程的客观性为特征的话,空间连续性的先验参数就可以被应用。
测试时,我们用f(x,y,n)来表示帧。在这一章中,对于一个基本序列,我们用函数f的三个变量来表示:两个空间变量x和y,和一个时间变量n。当函数是多频带的或是一个随机变量,我们用黑体表示为f。变化检测的问题存在于结果中,对于每一帧图像n,一个二进制映射c(x,y,n)定义了f(x,y,n)中相对于参考图像发生了变化的像素。二进制掩码c(x,y,n)是变化检测分析的结果,它定义为

可以采用不同的策略M计算c(x,y,n),它是f(x,y,n)和f(x,y,r)的函数:
c(x,y,n)=M(f(x,y,n),f(x,y,r)) (10.2)
我们将M分解为四个主要步骤,分别命名为特征提取、特征分析、分类和后处理。这种结构允许我们对比参考文献中提出的不同技术。前面提到的方案的方框图由图10.1表示。
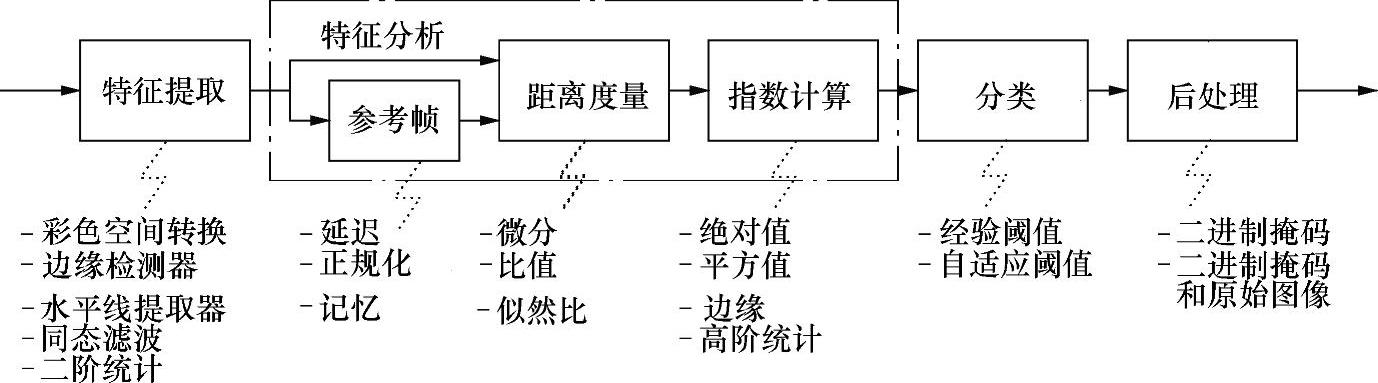
图10.1 变化检测算法的主要步骤和在参考文献中常使用的不同技术
有关算法M的选择包括从f(x,y,n)和f(x,y,r)中提取的特征,量化的距离测度,和变化检测的分类策略。(https://www.xing528.com)
变化检测的第一步通过转换F把图像序列f(x,y,n)的每一帧转换到最合适的特征空间中。特征空间的选择决定于算法要用在哪里。第一步的结果定义了序列g(x,y,n):
g(x,y,n)=F(f(x,y,n)) (10.3)
g(x,y,n)代表了变化检测运算将要执行的信号。特征提取之后的步骤是特征分析T,它是为了得到一个指标,能够显示当前帧的活动性:活动指数。活动指数是通过对比g(x,y,n)和一个参考图像g(x,y,r)来计算的,这一步的结果得到序列t(x,y,n),定义为
t(x,y,n)=T(g(x,y,n),g(x,y,r)) (10.4)
这个活动指数属于下面两类中的一种:变化的或是不变的。为了获得分类结果,t(x,y,n)通过阈值进行二值化。最后结果根据如下测试得到:

阈值τ可以根据经验设定,也可以由自适应计算得到。分类步骤的结果受到不同环境下噪声的影响。除摄像机噪声之外,变化检测算法中模型的近似也会产生噪声。为了减少这种错误警报,通常还需要一个后端处理过程。
在后面的部分中我们将对参考文献中提到的解决变化检测算法问题的不同技术做一个介绍。另外,我们要讨论与上面提到的模型相关的选择。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。