



通常建筑物与房间有直线、平行和正交等细节,例如,窗框与地板的边缘自图像中仍是直线,平行和正交不会经摄像机的投影所保存;因此,平行边会相交于单个的灭点,直角会以任意形式出现。16世纪,画家们应用这些几何属性在绘画中表达现实主义,通过在绘画中强调正交灭点反映透视定律。
内部标定恰恰相反。针对人为假设的某种结构,人们试图寻找一些方法能够自动检测灭点以及自动计算K与摄像机的自转R,这被看作目标的标定,这种结构作为线段的映像,而这些线段能够被常用线段摄像机检测器发现[92]。最早尝试检测灭点的方法得追溯到20世纪70年代,灭点通过在绘画中检测方法的综述在参考文献[421]。
灭点通常是远离图像中心的。几乎所有的方法都将线段作为信息源来计算灭点,形成并行线的线段中发生的小误差对灭点的位置有很大的影响。事实表明,发明一种准确检测的方法很难。
Caprile与Torre的工作对基于灭点的内部标定起了重要的作用,他们使用立方体的边缘来计算图像中的三个正交有效灭点。再加上零偏移与长宽比不变,他们能估计出焦距与主点,经过仔细地研究文献,我们可概括如下:
①首先在投影面上定位灭点[275,465,319,514,456,424]。某一齐次矢量既表示有限点又能表示无限点,从图像面映射到一个球面[38,46,349,436,118,341,80,114,494,543,19,208,302]或者是到Tuytelaars的子空间都不保存其距离,因此,成本函数可以是任意小且平坦。
②图9.6比较了由相交线段计算灭点的几种方法。这种相关误差的距离测度具有多种形式。Liebowitz误差距离[465,319,456,424]与图像平面上灭点的位置无关且效果较好(i)没有奇点。(ii)可优化的高斯误差模型;(iii)是连续二阶的;(iv)是二次的。
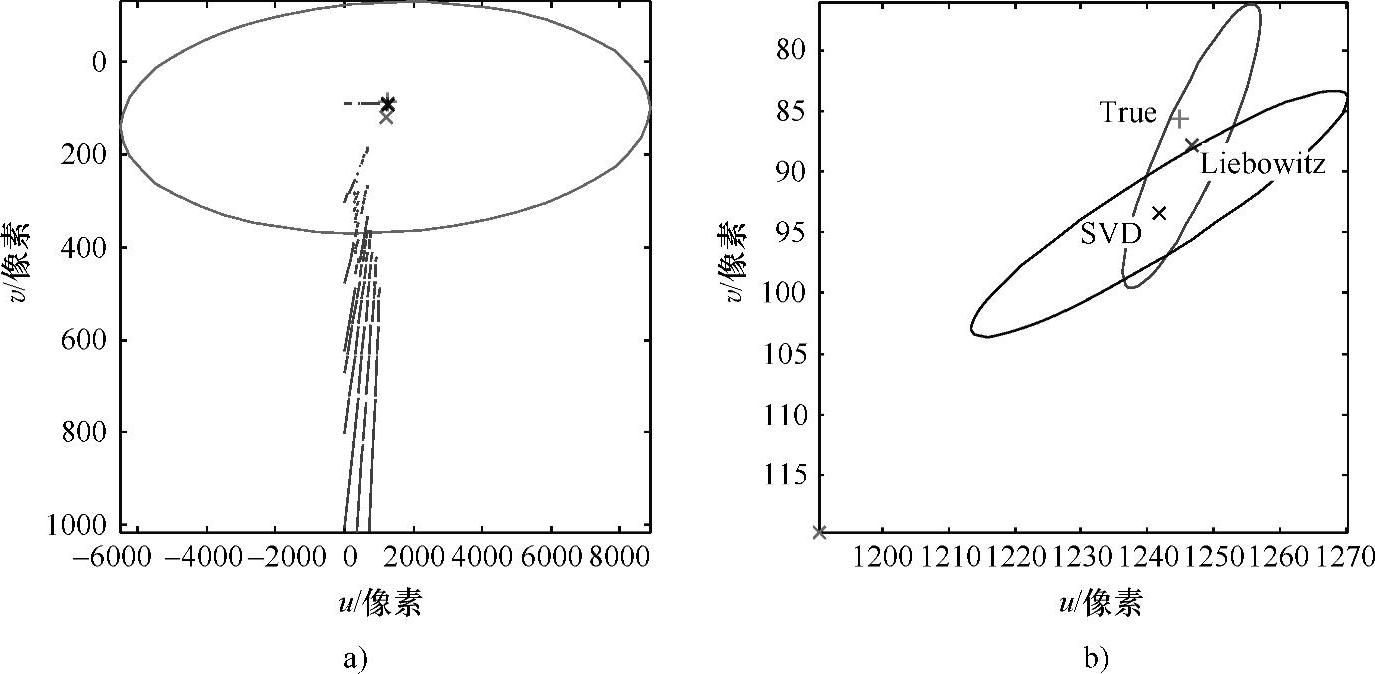
图9.6 对可能相交的点做了比较
a)在平均数意义上具有很大的不确定性 b)局部显微放大图a)在两两合成的线段之间的相交点的平均数(图中明显的十字形,在u方向上的相对误差为4.57%,在v方向上的相对误差为28.44%) b)对所有延长线段,基于最小归一化欧几里德距离的SVD计算得到的相交点(在u方向上的相对误差为0.24%,在v方向上的相对误差为8.30%),以及最后用Liebowitz方法得出的优化相交点(在u方向上的相对误差为0.15%,在v方向上的相对误差为2.47%)。椭圆刻画了99%的置信区间。平均数的方法具有很大的不确定性,也是迄今为止最糟糕的估计方法。正如所预期的,优化相交点的方法产
生最好的结果(好于前者3倍以上)
③灭点的检测是同时聚类与估计问题,而有前景的方法是遵循期望最大化的算法[477,383,19,302,424]。(https://www.xing528.com)
④灭点不是在搜索区的任意位置,大多数情况下,关于场景与摄像机的信息是可用的,这些信息可应用于指导搜索。
⑤镜头畸变通常是不可忽略的。径向畸变是可以满足优质镜头的,镜头失真的估计是内部校准的一部分[79,544,216]。
⑥在检测灭点后,内部标定的计算不是后处理步骤。摄像机的未知内部参数是最优化的目标,正如我们所见,灭点是成列的H∞=KR。
采用图9.7中的实际场景实验表明:内部参数与理想情况之间的平均相对误差在5%以下[421],在这个误差范围内是允许用于视频监控的。因为在实际中产生的误差总是在1~0.5m,这一距离段是人的平均宽度,当这些线段均匀分布在图像中并且三个正交方向也被很好地表达的时候,相对误差会下降到1%以下,这属于在标准范围内使用校准模式[537]。
灭点对所观察场景中的重要信息进行编码,也可以为另一高层次的任务提供便利,例如,检测直线结构,在人造的户外与户内环境中,直线几何结构是最普通常见的直线结构之一。在许多实例中,人们总能将语义标签与检测区域矩形状联系起来,如门、窗、海报、建筑门面,平面结构也被认为是支持共面点的大区域,从而为地面检测和宽基线匹配任务及其后续分段三维平面重建、计算几何性质提供了一种替代的方法。在监控应用中,简略的场景几何有助于限定目标检测的应用。
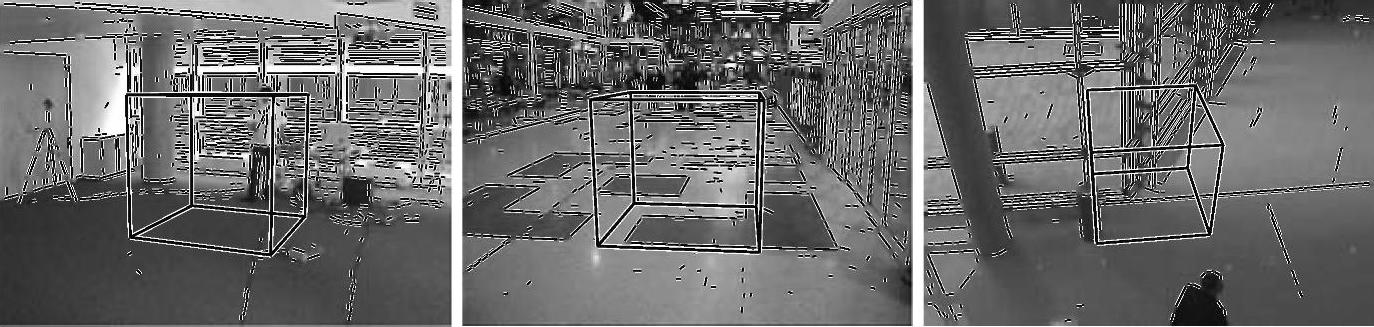
图9.7 实际场景:图片给出了室内场景下Plufgfelder内标定的结果[421]。线段分组属于至少两个正交灭点,然后计算内参数和方向。图片中重新投影的立方体被估计方向,灭点(立方体边缘的定点)和主点(立方体的重心)
这些似乎说明了对于灭点进行有效和可靠的检测的很重要的原因。图9.8给出了一个例子。当然,人们有可能合并一些灭点作为附加参数,对于估计摄像机内部参数具有重要作用,同时也可采用线性结构搜索这些参数。

图9.8 线性结构的检测,从左边开始:①输入内嵌消失线的图像。②用Micusik等人提出的方法[380]检测四边形。③基于Markov随机场的方法,并利用已经提取的四边形将图像部分分割成三个正交面。每个平面用不同的灰度级描述,最亮的表示“未定”像素。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。