



已知两个世界坐标中方向的围角,它们的灭点在视觉信息和场景信息分析中具有较高的利用价值。让我们不受任何限制地假设世界坐标系在摄像机中心,等同于摄像机坐标系,或更正式,P=K[I30]。摄像机中心发出的每条光线都有其特定的方向,因而在世界坐标系中也具有特定的方向。这些射线在灭点穿透像平面。直觉上,封闭角告诉我们,像平面到摄像机中心的最短距离是焦距,是K的一部分。可以这样想象,更多的射线对和角度将能计算出所有的内部参数。
在数学上,我们把两个方向d1和d2的交角用ϕ表示:

这是欧几里德空间的所有方向内积,即Ω=I3。通过利用K把这些方向映射到它们的消失点,然后用ω取代KTK-1得到下面公式:

这是未知量ω,两个灭点(视觉信息)以及ϕ(场景信息)之间的一个非线性关系。
在特殊情况ϕ=π/2下(如图9.4),上述关系简化为(https://www.xing528.com)
vT1ωv2=0 (9.20)
这是未知量ω的为双线性关系,但可以重构为线性关系(等式9.17)其中ω由w所取代[229]。这种关系提供了一个对ω的约束,因此,5个独立的正交灭点对足以计算ω。
正交灭点也告诉我们摄像头对于世界坐标系的相对旋转;正交灭点是成像坐标轴世界坐标系的方向。改变了像素灭点的位置会改变摄像头的方向。不幸的是,如果没有更多场景信息,真实世界中的上、下、左、右这些关系是未知的,则绝对的旋转是不能识别的[2]。
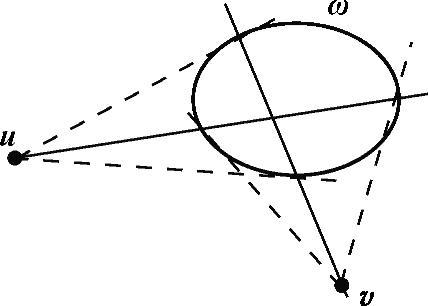
图9.4 正交方向的灭点相对于ω共轭正交,因此限制了ω。例如,(第9.4节)世界坐标系上正交平面平行线与灭点u和v成几何影像,v在u关于ω的极线上,u在v的极线上,极线分别由通过u和v的ω的切线来定义(称为极点)[479]
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。