



经典的图像处理是基于图像传感器按帧产生的数据进行运算的。习惯上,基于时钟的图像传感器获得场景信息可能要采用这些形式:逐像素、逐行/列或其他形式,如并行像素,但一定是在某种帧速率下对时间进行量化。每个数据帧都被记录、传送且以某种方式处理后,携带着所有像素信息,这些信息与前一帧或前几帧发生的变化无关。这种依靠场景动态内容的方法很明显地导致了图像数据的高度冗余。此外,每一像素上都要施加相同的曝光时间,使得对景象动态范围的处理变得很困难。
与基于帧的图像感知不同,异步方式成像的范例,如基于事件的视觉技术,是以像人类视网膜一样的生物视觉系统为蓝本的。生物视觉系统没有帧的概念,视网膜是以异步的,大量并行的、数据驱动的方式输出的。基于事件的传感器,具备自计时功能,其输出数据量取决于目标景物的动态内容——那些未受到视觉刺激的像素不会产生输出。与传统的基于帧的图像传感器相比,基于事件的传感器几乎完全抑制了图像数据的冗余,并且降低了对处理功率、内存、传输带宽以及电源供给等多方面的要求。
基于异步地址事件表示(AER)的视觉传感器,其输出形式是数字编码地址,在像素阵列中指定x、y的地址,通过异步仲裁数字数据总线进行通信。事件是由像素局部生成的,意味着像素的操作是自动、独立的,并且能够决定何时(通常是在本地增益控制之后)量化视觉信息、进行时空处理和减少冗余。
各种不同种类的AER视觉传感器在过去的几年中相继地发展起来,其中包括以下七种:
①TTFS编码成像[492,221];
②标准CMOS中的PFM编码成像[133],蓝宝石基底的硅外延技术用于背光[132];
③空间对比技术[126];
④时序对比技术[317];
⑤PWM成像,时序对比事件发生条件下的读出技术[432];(https://www.xing528.com)
⑥方向选择滤波器[111];
⑦异形器件,如采用多像素和暗激励技术的小凹成像仪[222]。
当前,一种基于事件的异步AER视觉设备是时空对比动态视觉处理器(DVS),它是由T.Delbruck等人[316,317]改进的。这种传感器是以人类/脊椎动物视网膜瞬时通路为蓝本的,同时在自动像素阵列中执行本地相关变化检测。Kramer等人[304]提出了这个设备的前身。这种传感器产生的数据包含了场景信息的变化内容(大多数情况下是由物体运动引起的),具有很高的时间分辨率。因为输出带宽自动为景物的动态部分所专用,所以这些设备特别适合于包括运动检测和分析的应用。基准电平(DC)在像素中被丢弃了,因此传感器数据中没有包含强度的信息。
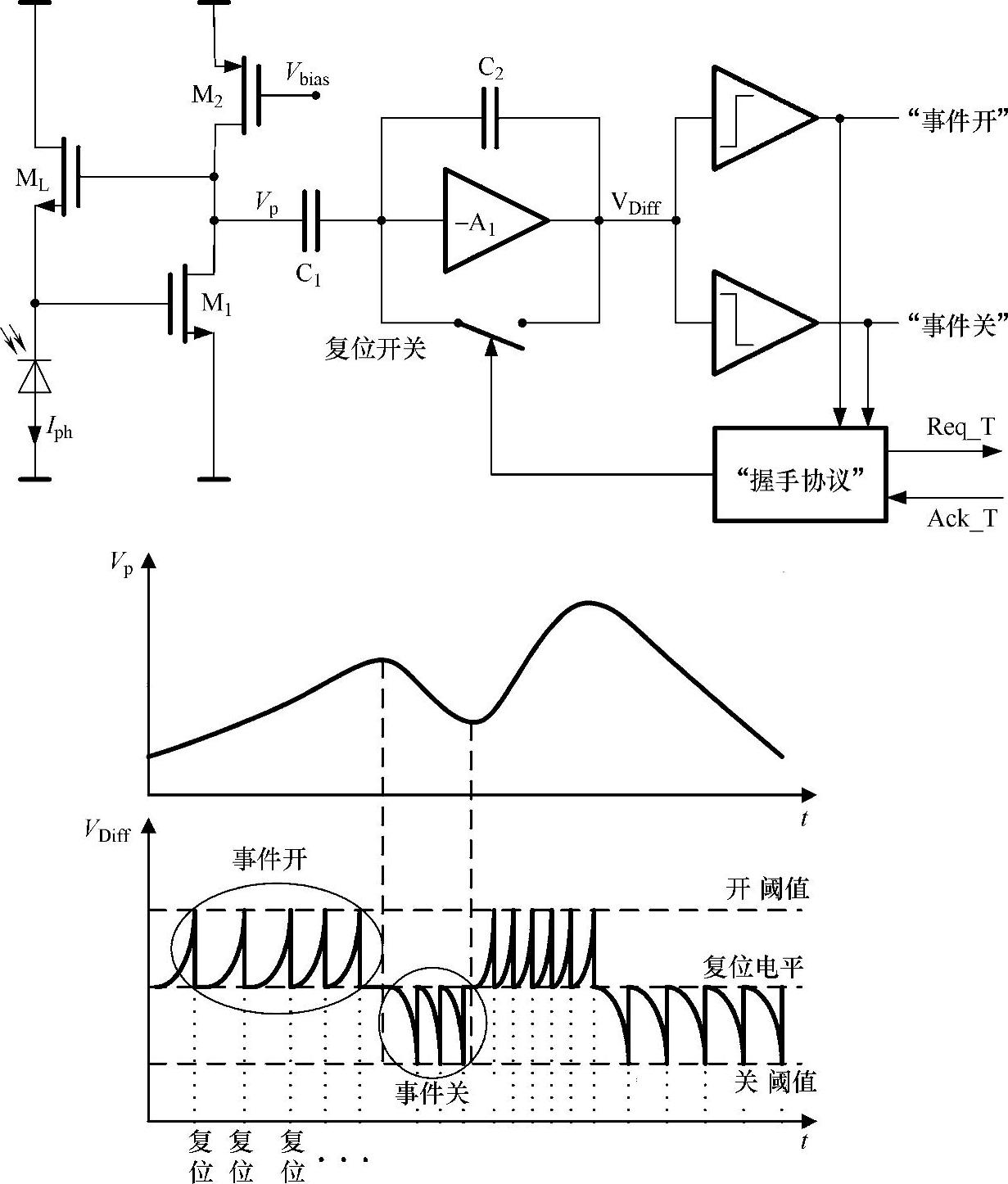
图4.15 DVS像素原理图,感光电压Vp和峰值超时电压VDiff的典型波形。当极性梯度(朝上或朝下)取决于信号是否达到阈值的高低门限(“ON”或“OFF”事件)时,变化率按事件间隔进行编码
图4.15给出了DVS像素的范例以及典型的信号波形。该像素电路包含一个具有共源反馈(PD,ML,M1,M2)功能的快速对数感光电路,一个能高精度(A1,C1,C2)放大突变的差分电路,还有两个用于正负梯度情况的共源比较器。该感光电路自动控制各个像素增益,利用对数响应的方式同一时间快速响应照明变化。通过电容耦合,在每次重建工作点后把差分电路的输出置于复位状态,从而消除连续时间感光FPN。可变增益放大器是由调节C1/C2电容比确定的。借助于差分电路直流清除功能且光感受器的对数特性,在时空对比和相关量化两方面,像素的敏感度高于像素亮度的绝对变化。
基于时空对比的DVS像素电路,设计了一些传感器件。例如,低、中分辨率阵列传感器[316,317],用于高速工业视觉的带有片内时间戳功能的线性传感器[431],基于微测技术的晶体管IR传感器[363],以及异步无冗余PWM灰度成像QVGA视觉传感器[432]。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。