



图3.3给出了四个研究用的智能摄像机系统。NXP(前身Philips)公司研发的WiCa摄影机mote嵌入了一个或两个VGA(300k像素)彩色图像传感器,连接了Xetal系列的IC3D SIMD处理器(参考第12章)。通信接口由低功耗的ZigBee模块组成。使用ATMEL 8051控制器来控制系统的操作和通信。IC3D装置拥有一个由320个处理元素构成的LPA(线性处理器序列),有64个由3200bit构成的线性存储器。这个结构对每个像素执行相同的操作,这对于低级别的图像处理是非常有力的。例如,处理QVGA图像(320×240)时,一整行像素可以存储到每个线性存储器中被同时处理,每个像素分配给LPA的每个PE(处理元件)。
Stanford的MeshEye无线结构提供了一个有趣的多传感器混合分辨率方法:这些传感器是基于CMOS VGA彩色图像传感器以及在类似光电鼠标上找到的两个或者更多像素的传感器。这个系统由一个ATMEL微控制器结合一个ARMRRDMI处理核和一个ZigBee接口来完成。混合分辨率传感系统用典型的早期主动视觉方法来优化数据获取的进程。例如,一个低分辨率的传感器可以被用于场景中的动态探测。如果一个移动的物体被探测到,另外一个低分辨率的传感器可以用于立体匹配,而且一旦一个推断出移动物体的位置和大小,包含这个物体的WOI就可以最终由VGA传感器获取。这种高分辨率的WOI可以被存储起来后做进一步处理(识别或分类),然后传送到主机电脑,或者在网络环境下与邻近的摄像机交换数据。
Bourgognea大学的Le2i Laboratory的高速智能摄像机,配置1.3M像素的高速CMOS图像传感器(MTPM413来自于Aptina,前身Micron)、一个XILINX系列的Virtex IIFPGA装置和一个USB2.0端口。它的图像传感器在全分辨模式下每秒可以获得500帧图像,意味着数据传输率达到6.55Gbit/s。为了通过USB 2.0接口(480Mbit/s)来传输视频流,在FPGA装置中应用了压缩算法(压缩比是30∶1)及一些图像传输任务,如Sobel过滤器,腐蚀、膨胀和标志提取的质心计算。
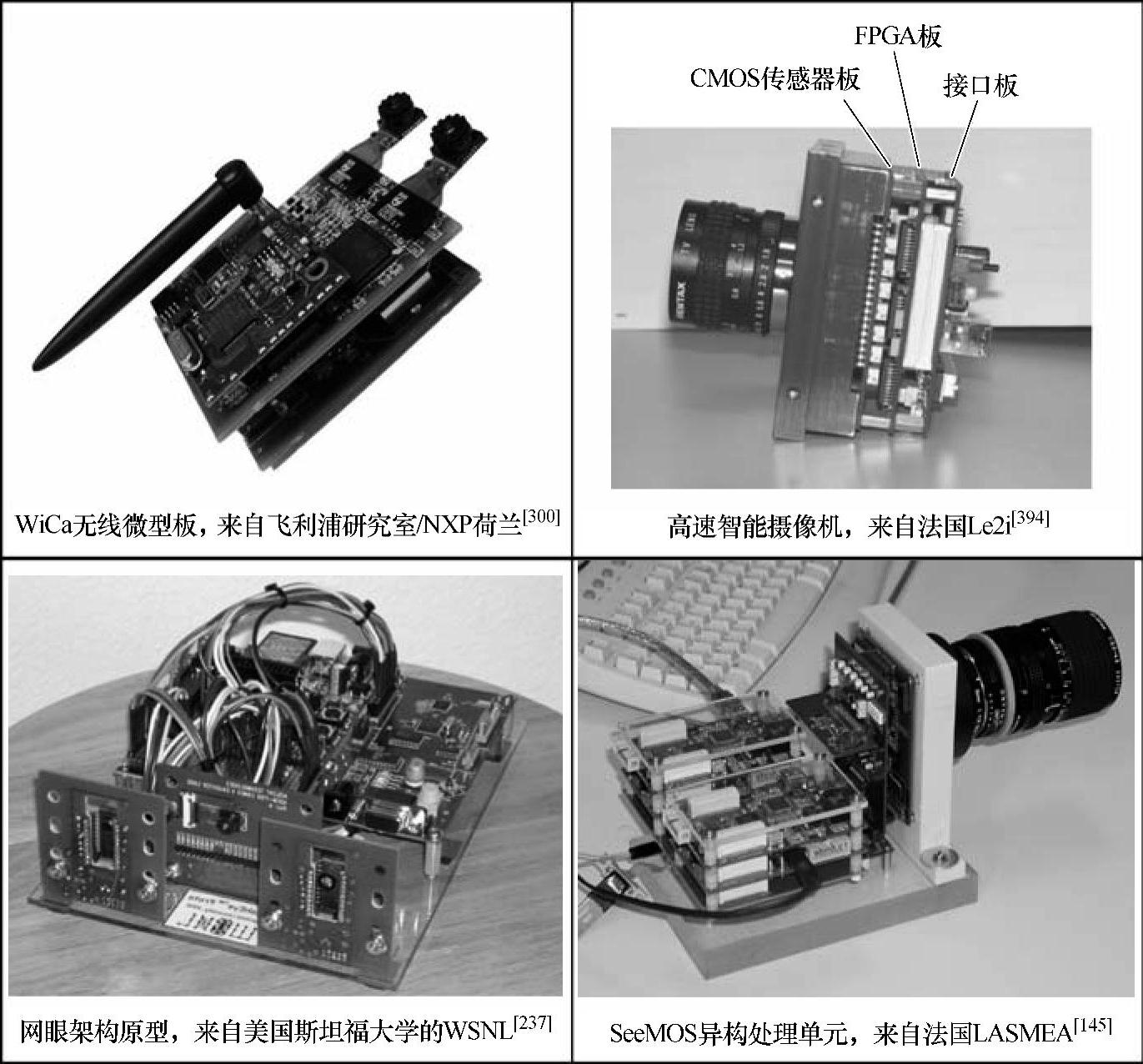
图3.3 关于智能摄像机研究项目的案例
由LASMEA[144]提供的SeeMOS结构包含Cypress Semiconductor LUPA 4000单色4 MPIXEL CMOS图像传感器,一个Firewire接口,一个由ALTERA Straitix的FPGA装置组成的异构处理模块和TI公司的TMS320c6455 DSP装置。另外,一个三维内在感应元件被集成在图像传感板上,包括三个加速器和三个回转器。FPGA装置通过一个定制的编程控制核来负责控制和同步整个系统。这样,仅仅用一个HDL例程就可以使得不同的应用程序以最小(或零)代价实现。充分利用4M像素传感器的随机地址技术,以获得高帧率(如对140×140帧数每秒1000帧率)。FPGA中的SIMD单元或DSP软件程序都可以进行数据处理。后者通过EMIF协议(扩展存储接口)和五个独立的2M内存条来与FPGA通信。由于高清晰度图像获取的控制、内在传感技术以及可开发的高级并行化技术使SeeMOS智能摄像机成为主动和初级视觉算法的一个合适平台。
其他与智能摄像机的研究相关有趣的例子是Carnegie Mellon大学提出的CMUcam项目和Graz大学提出的SmartCam项目。CMUcam项目生产的三代智能摄像机,均可出售。“CMUcam 3开放资源可编程嵌入彩色视觉平台”以有CIF分辨率彩色图像传感器(352×288)和一个基于ARMTTDMI核的处理器为特色。可以进行模拟视频输出,而且能够集成ZigBee无线通信模块。CMUcam 3平台也包括一个开放源码环境,一个基本图像操作库以及其他软件设施如语言转换器、抓帧器和其他图片打印工具。(https://www.xing528.com)
SmartCam项目[77,446]利用一个CMOS VGA图像传感器和两个TI公司的TMS320c 6415DSP芯片,通过机载PCI总线互相连接开发了一个平台。由于嵌入了网络处理器(Iternet IXP425),可以开发几个通信系统(如Ethernet、USBRS232、WLAN和GSM)。交通监控系统可在这样的平台上实现,而且又提出了高达十个DSP装置的可扩展版本。在分布式监控系统中也应用了这样的平台[78]。
目前,工业智能摄像机可以列举来自全世界几个生产商的成百上千个产品,以及大量各种可能的应用。德国的VC vision component提出了几个装置系列。Optimum系列(VC44××)包括6个高性能智能摄像机模式,装置了分辨率高达2M像素/s的CCD图像传感器和一个1GHz DSP、RS232以及Fast Ethernet通信;再加上数据I/O接口作为外接装置控制。
澳大利亚GMBH研究中心的智能系统部门提出了交通监控智能传感器[50]和人流量统计智能传感器,这两种传感器都是基于一种新的、自主的图像技术,可以对于光强度的相应变化作出自主的、自发信号的像素响应,尤其适合检测移动物体,且对于图像光线和形状的变化具有较强的鲁棒性。
National Instruments提出了五种智能摄像机模式(NI 17××),均采用CCD单色图像传感器(分辨率为:640×480或1280×1024)、嵌入PowerPC处理核和Gigabit Ethernet接口。1762和1764模式也以采用了TI公司的720MHz的DSP为重要特色。把光控制器集成进去可以控制摄像机下方物体的亮度。这个特点对于工业应用(如质量的监控)是非常有用的。也可提供一个开发环境(NI视觉自动检测生成器),正如用CabVIEW对摄像机编程的开发包。
SICK IVP提出了工业环境下的两种智能摄像机模式:IVC-2D和IVC-3D。这两种模式都装配了一个800MHz的处理器,一个FPGA处理加速器和Fast Ethernet接口。IVC-2D装置了一个CCD图像传感器。IVC-3D装置的CMOS芯片优化了三维图像并能用摄像机内的激光器和三角划分方法来测量高度。激光器在物体上划一条线,而相机从一个角度观测这条线,便看到了与物体高度轮廓高度吻合的一条曲线。当物体在激光束下通过时,由这个物体的多个高度轮廓构成了一个三维图像。方便用户使用的IVC Studio编程工具被用于摄像机的编程和配置中。
其他例子如第2章提到的索尼XCI、Intellior ILC智能摄像机和NeuriCam VISoc CMOS智能视觉片上系统[10]。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。