



现有文献中没有明确指出何时首次出现了智能摄像机的概念。这一概念可追溯到军用或空间应用,在航天飞机中,需要有一个机载独立系统来解释场景。20世纪60年代,出现了这样的想法:拥有一套成像设备和能实时解释场景的处理单元。1961年,NASA喷气推进实验室的E.F.Lally发表一篇论文[307],名为“Mosaic Guidance for Interplanetary Travel”(星际旅行中的马赛克导航)。该论文在美国火箭协会的年会呈现并提出人控火星任务,其中包括用于机载导航的摄像机设计,该摄像机采用马赛克阵列光电检测器,其输出信号在数字域中进行处理。这是数字摄像概念的首次出现,也是智能摄像机的早期概念。
Hans Moravec[386]报告了20世纪60年代早期设计的一辆小车,具有导航和避障能力。这辆小车由计算机遥控,通过装备在小车上的电视摄像机,计算机能控制小车运行实际的简单障碍路线。图1.5所示是这种小车于1963年的最初模型图片。如图1.6所示,一只电视摄像机固定在小车上。主要因局限于那个时代的计算机与转换器体积,不可能制造紧凑型智能摄像机。把图像从电视摄像机传送至A-D转换器(如冰箱大小),然后把数据线接入至充满计算设备的房间以便进一步处理和解释信息。
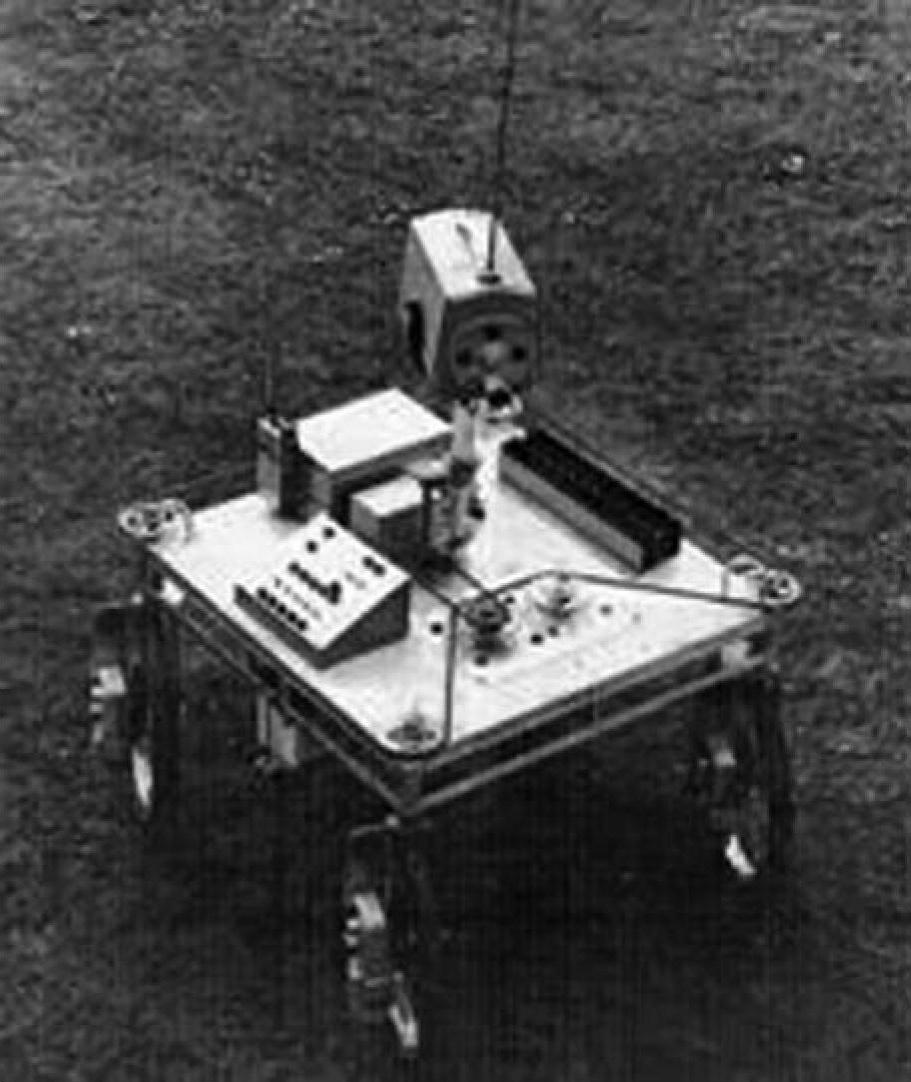
图1.5 1963年斯坦福设计的小车

图1.6 1975年载有电视摄像机的小车
1966年,Runge等人采用分立元件[461]实现了鸽子视网膜的电子模型,如图1.7所示。接着,Fukushima等人设计了另一种视网膜模型,由700个感光器组成离散模拟网络[200]。以模拟电路为基础的网络处理图像可视为(智能)超大规模集成电路视觉处理的开端。(https://www.xing528.com)

图1.7 Runge等人的鸽子视网膜,具有传感器阵列。模型采用离散模拟网络[461],镉硫化物光电传感器,视角约40°
Herbert Simon在20世纪50年代中期已经预言“20年内,机器将有能力完成人所能做的任何工作”。在不到20年的时间内,他的预言在机器人技术领域得到近似验证。如图1.8所示,Shakey是第一个能进行动作推理的移动机器人;斯坦福研究院人工智能研究中心在1966~1972年开发了这种机器人[455]。由于Shakey对环境的感知和建模能力有限,因而其任务是完成规划、路径发现和简单对象重排序。在20世纪60年代末的一期《生命科学杂志》中,Shakey被引证为“首个电子人——它在没有收到来自地球的指令情况下,能在月球上一次性漫游数个月”。Brodin在1980年发表的一篇文章中报告了一种计算机接口的电视系统,取名SY-DAT,它在1972~1974年期间建成于瑞典皇家工学院仪器实验室。该实验室的主要工作包括光电二极管阵列与红外、X射线图像检测器设计;信号处理及其电路;内建处理功能(智能传感器)的专用摄像机;人机接口;实验室系统开发,计算机系统及软件,这些都是智能摄像机系统的早期工作。

图1.8 Shakey是第一个能进行动作推理的移动机器人
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。