



1.PID指令
PID指令是一个用于闭环控制的输出指令,梯形图符号如图8-3所示。
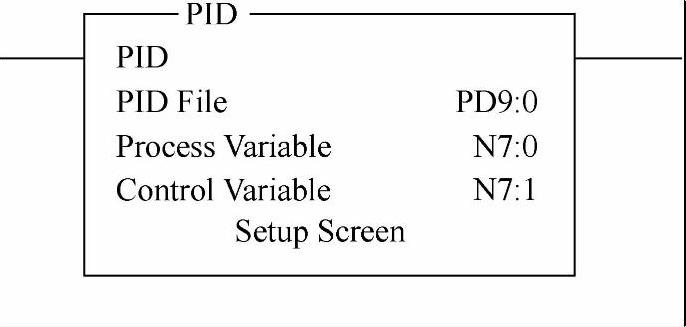
图8-3 PID指令
图中各项含义如下:
PID File:PID数据文件号。在使用PID指令时需要创建一个PD数据文件用于数据的存储。如果没有创建,在输入PID指令的PID File后,系统会自动创建一个PD数据文件。
Process Variable:反馈通道过程变量存储区,整数存储区。如将1槽0通道的模拟量输入值作为反馈值,此处可直接输入地址I:1.0。过程变量被整定后可被接收的数据范围是0~16383。
Control Variable:PID运算结果输出通道,整数存储区。如将2槽0通道的模拟量输出值作为执行机构的执行量,此处可直接输入地址O:2.0。输出值范围是0~16383。
PID指令在使用时,最好是无条件调用。如果在有条件调用的情况下,当指令运行的逻辑条件由真变为假时,PID的输出将被清0。
2.PID设置面板的参数调整
双击设置面板(Setup Screen),进入参数设置面板,如图8-4所示。
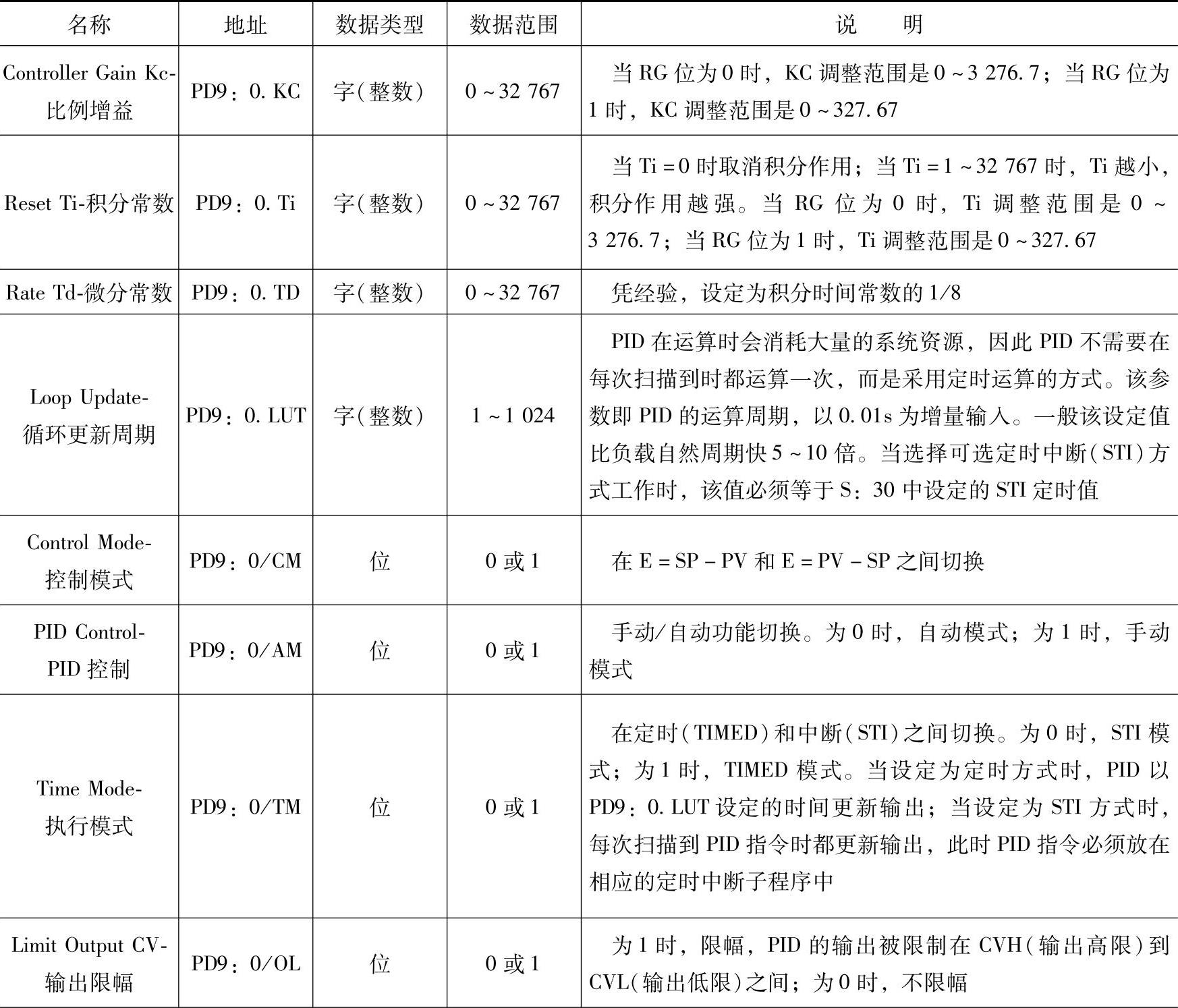
使用参数设置面板,可以实现对PID控制器的参数配置。PID可调整参数见表8-2。
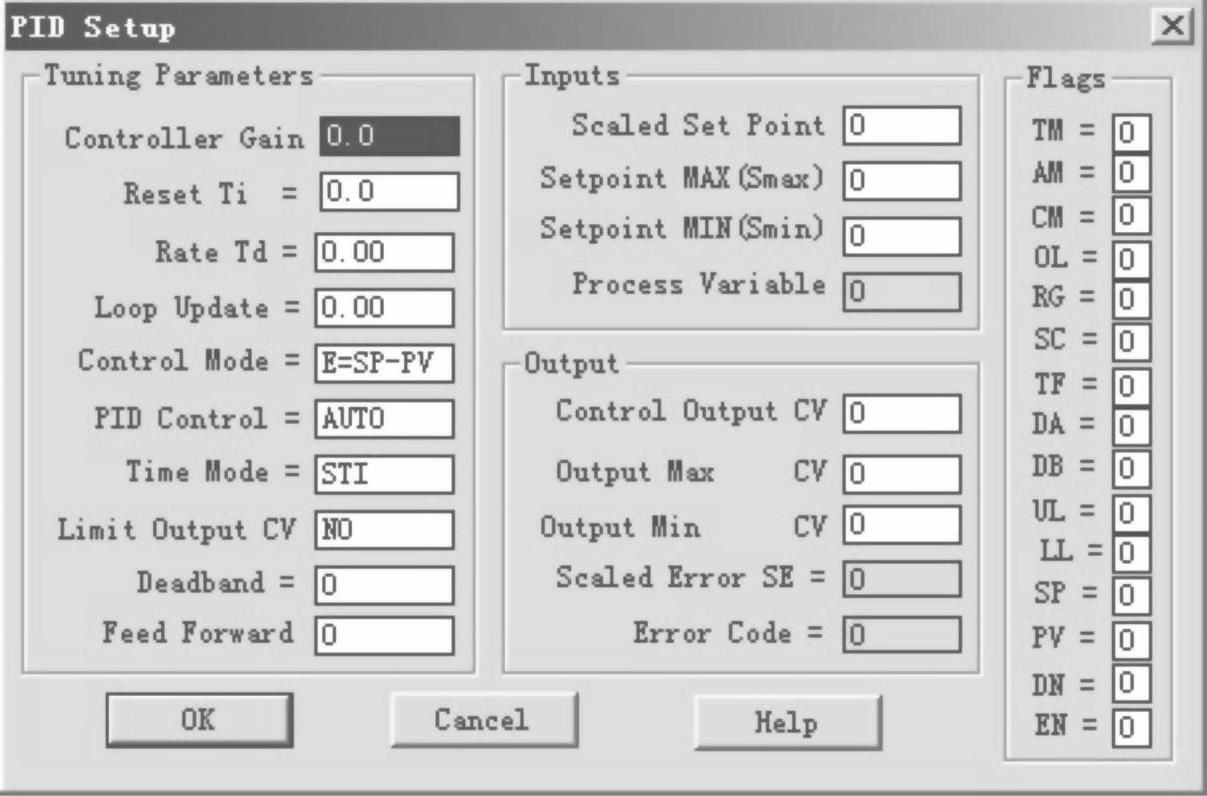
图8-4 PID参数设置面板
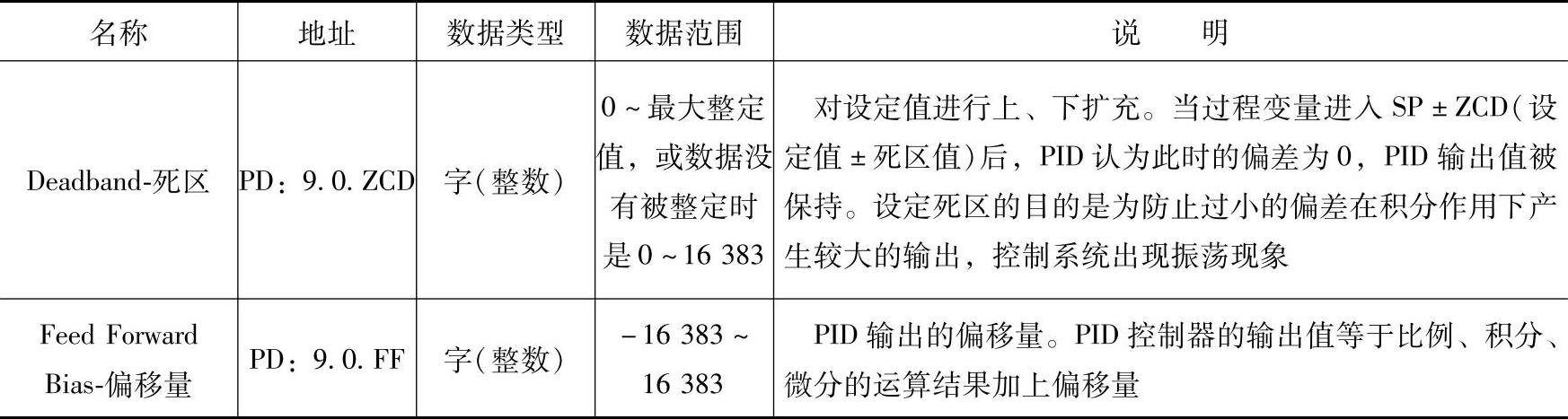
表8-2 PID参数设置面板中各参数的含义
(续)
3.PID设置面板的输入参数
(1)Scaled Set Point-设定值

①如果设定值不是以工程单位作为期望控制点,则该值的输入范围是0~16383;若是以工程单位作为期望控制点,则输入值应在工程单位的最大值和最小值之间。
(2)Setpoint MAX(Smax)

工程整定设定值通过对两个参数(Smax和Smin)或其中之一输入非零值加以选定,此时标志位SC=0。如果两个参数的输入值相同,则禁止对设定值进行工程整定,此时标志位SC=1。MAXS对应的过程变量为16383。
设定值以工程单位输入如图8-5和图8-6所示。
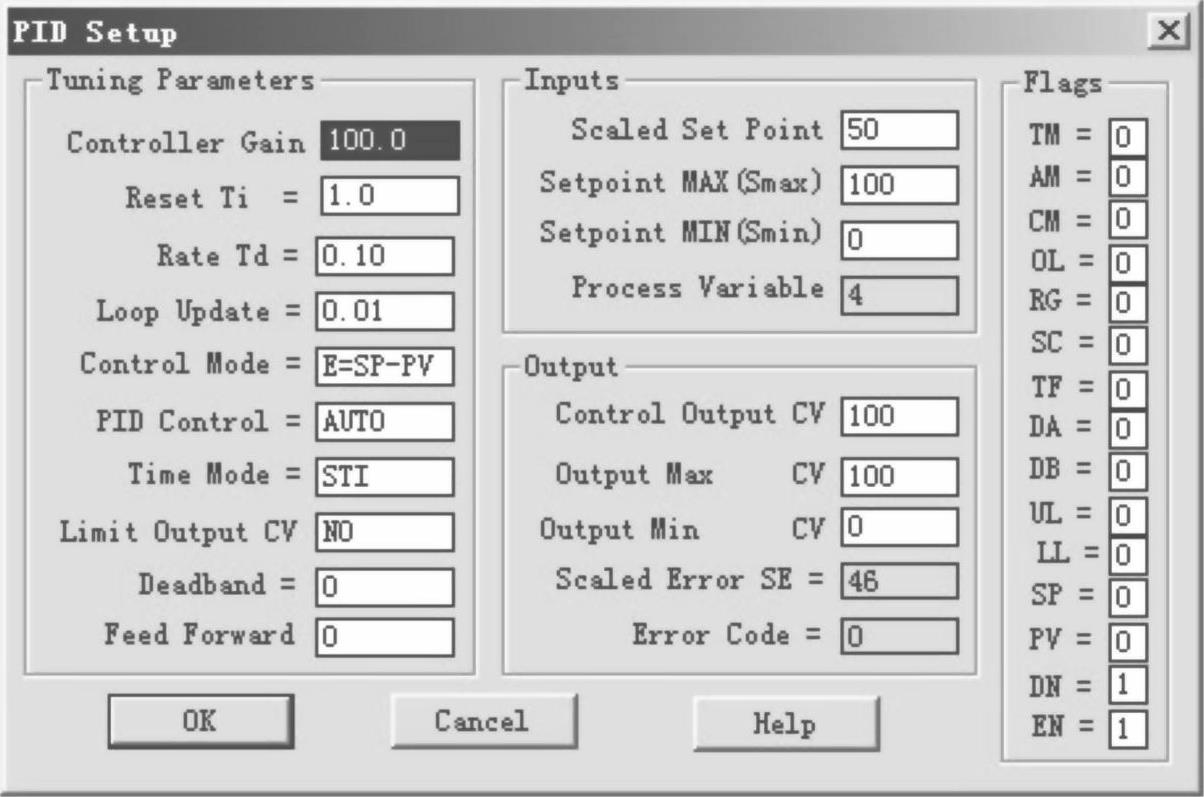
图8-5 PID参数设定一(过程值小于设定值)
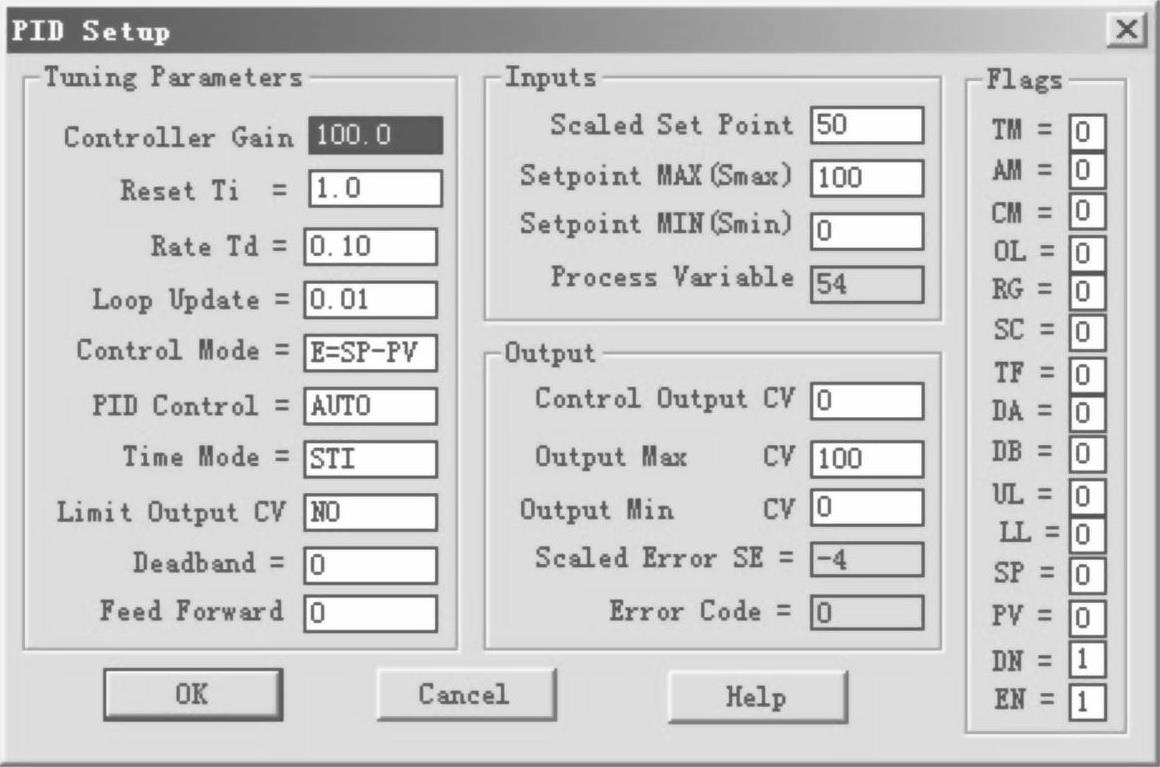
图8-6 PID参数设定二(过程值大于设定值)(https://www.xing528.com)
(3)Setpoint MIN(Smin)

如果SPV是以执行单位读取的,则MINS参数对应于以执行单位表示的设置点的值(当控制输入处于其最小值时)。
(4)Process Variable

若参数Smax和Smin相等,PV值即是过程变量的Scaled For PID整定数据,范围是0~16383。若参数Smax和Smin有一个非零,且不相等,此时是工程整定值。PV值被自动整定到工程范围(0~16383被整定成Smin~Smax)。
例如,N7:0中的过程变量为10000。当参数设定面板中的Smax=Smin=0时,此时在Process Variable中显示10000;当Smax=300,Smin=0时,则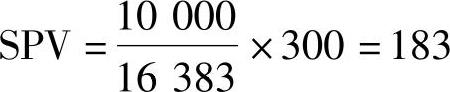 ,在Process Variable中显示的数值是183。非工程整定时的SPV值如图8-7所示。
,在Process Variable中显示的数值是183。非工程整定时的SPV值如图8-7所示。
4.PID设置面板的输出参数
(1)Control Output CV

此处的控制变量是以百分比的方式进行显示。0~100对应于实际输出的控制变量0~16383。当在自动模式(PD9:0/AM=0)时,CVP自动跟踪PID输出的控制变量;当在手动模式(PD9:0/AM=1,PID Control中显示MANUAL)时,在此对话框直接修改输出值即可,范围是0~100。
当PID控制器从自动切换到手动时,如果输出数据CVP没有改变,则保持自动运行时的计算结果。
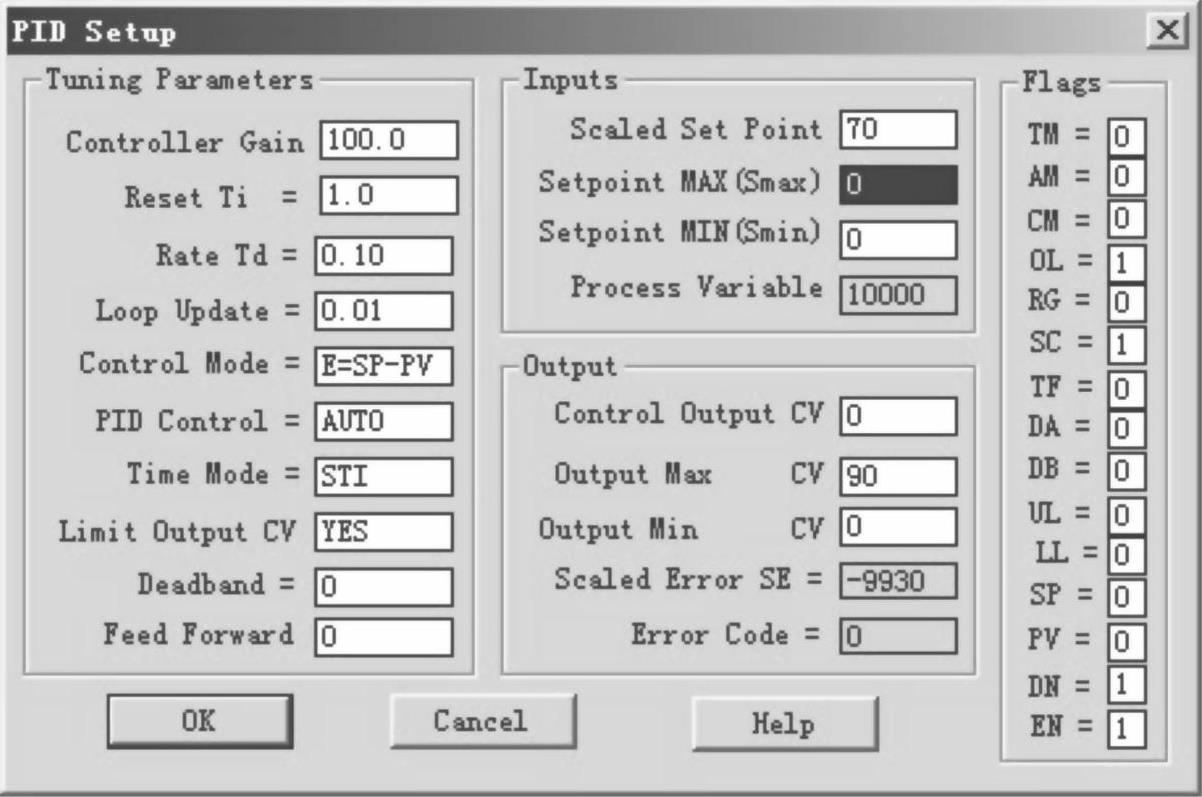
图8-7 非工程整定时的SPV值
(2)Output Max CV

当PD9:0/OL位被置位(为1)时,可以实现对输出限幅的目的。一旦PID的计算结果超过上限设定值时,输出数据被锁定在上限数值上,并引发上限报警(PD9:0/UL被置位)。当PD9:0/OL位被复位(为0)时,一旦PID的计算结果超过上限设定值时,此时仅引发上限报警,并不会限制控制变量的输出。PID控制器的输出限幅如图8-8所示。
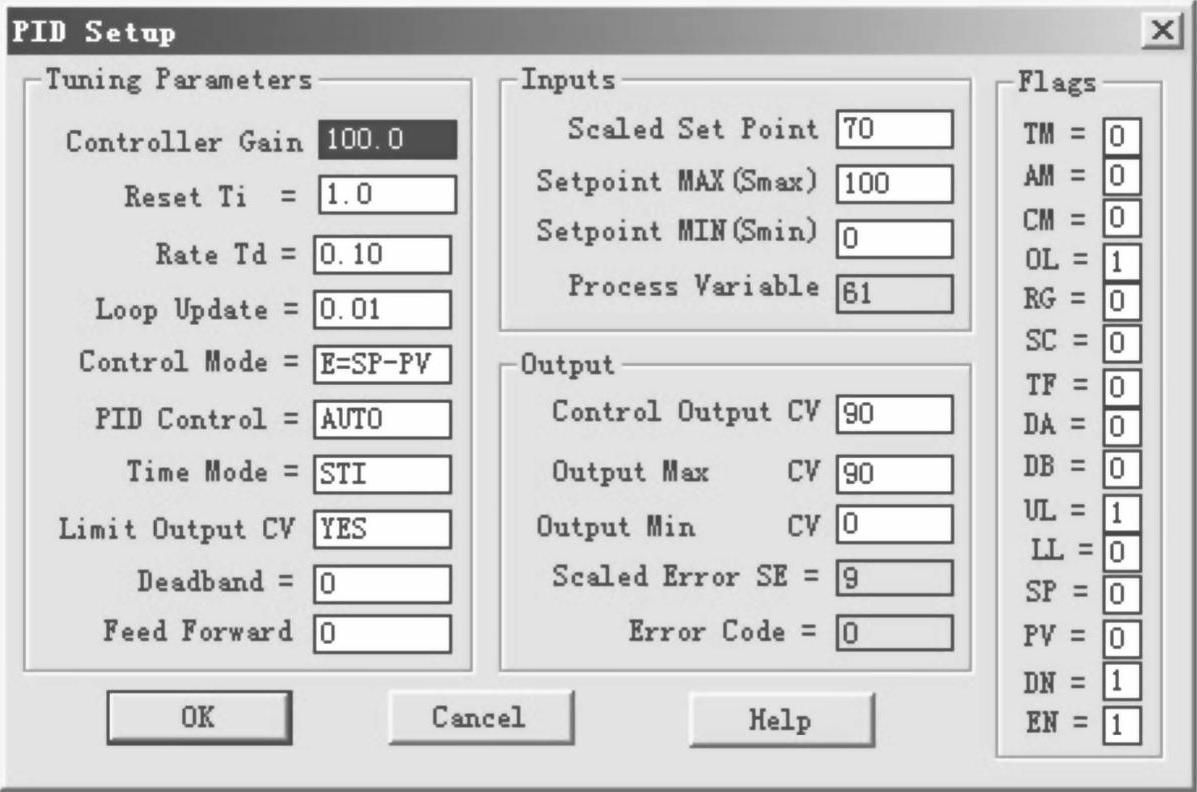
图8-8 PID控制器的输出限幅
(3)Output Min CV

与CVH类似,只是在低于下限时引发下限报警(PD9:0/LL被置位)。
(4)Scaled Error SE

设定值与反馈值之差。SE=SP-PV或SE=PV-SP,这取决于CM位的设定。SE分为非工程整定数据和工程整定数据两种格式,如图8-7和图8-8所示。
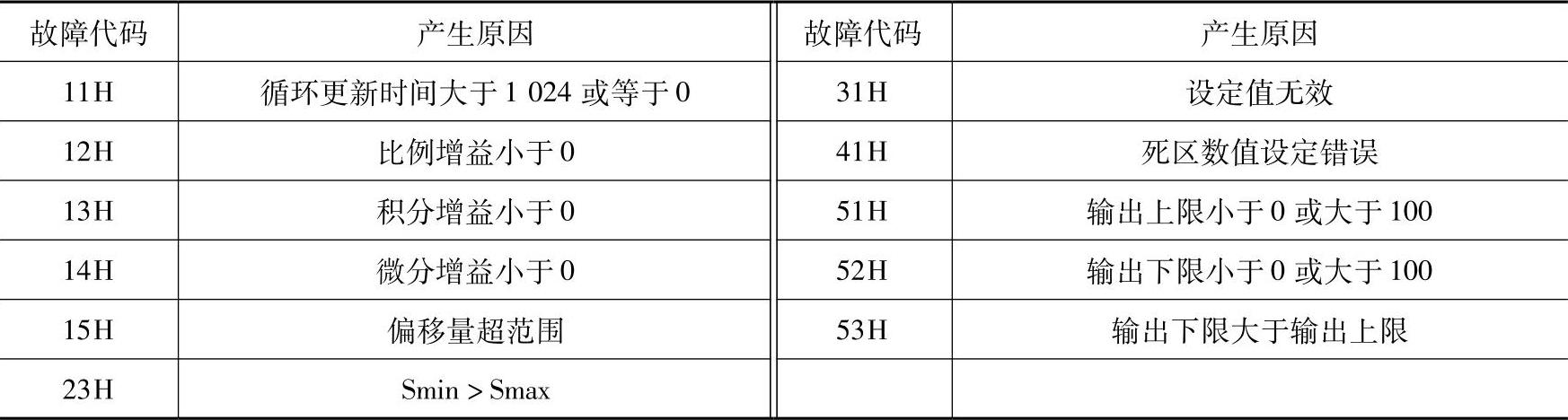
(5)Error Code
当PID在运行过程中发生错误时,会在状态文件的S:6中写入故障代码36H,并在对话框“Error Code”中显示出具体的故障原因。具体故障代码含义见表8-3。
表8-3 PID故障代码
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。