



机器人应用于包装机械行业已有多年历史,现在最新型的如库卡卸码垛机器人采用了精巧的“聚碳纤维”材料制造,令机器人在非常轻巧的同时具有更高强度,使其尤其适用于高负载作业。该机器人的卸码垛过程采用了FEM的最优化操作方式,而四轴倾斜式的设计降低了维护保养的成本。可通过不同的辅助系统,便能完成尼龙(纸)袋、纸箱、塑料箱、玻璃瓶的卸码垛任务。
1.库卡机器人的特点
1)KR180-2PA型机器人由机器人本体,KRC2控制柜、示教控制器KCP组成。
2)手臂后端为铝合金材质、高速运动曲线的动态模型优化,使得库卡机器人的加速性能比其他普通机器人高出25%,有利于提高系统寿命、优化工作节拍。
3)KRC2控制柜采用熟悉的个人电脑Windows操作界面,中英文多种语言菜单。
4)标准的工业计算机,硬盘、光驱、软驱、打印接口、I/O信号、多种总线接口,远程诊断。
5)KCP具有示教、编程、存储、检测、安全保护、绝对位置检测记忆、软PLC功能。
6)平均故障间隔时间长达7万h,是其他机器人所无法比拟的。
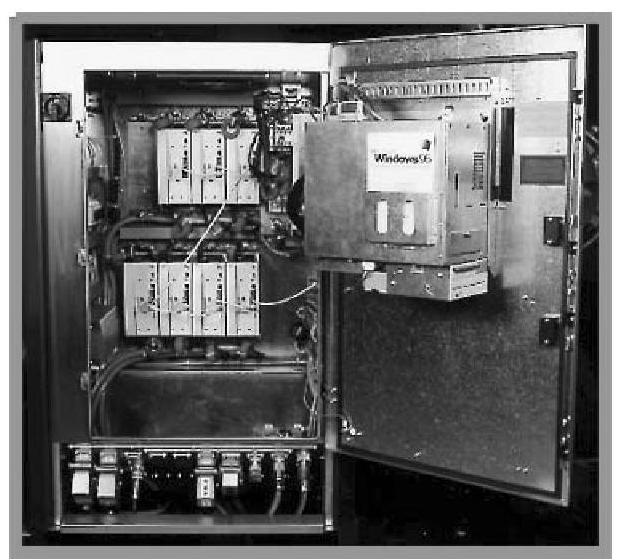
图15-14 库卡机器人控制器图
2.库卡机器人控制器KRC2
如图15-14所示为库卡机器人控制器图,具有如下特点:
1)标准的工业计算机PentiumⅡ处理器,采用高级语言编程,软件可自动更新和升级。
2)基于Windows平台的操作系统,可在线选择中文等多种语言。
3)支持多种标准工业控制总线,包括:Interbus、Pro-fibus、Devicenet、Canbus、controinet、EtherNet、RemoteI/O等。(https://www.xing528.com)
4)标准的ISA、PCI插槽,方便扩展。可直接插入各种标准Modem接入高速互联网,实现远程监控和诊断。
5)标准的控制软件功能包应用广泛,6D运动控制鼠标,方便运动轨迹的示教。
6)断电自动重启,不需重新进入程序,系统设置示波器功能,可方便进行错误诊断和系统优化。
3.库卡控制编程器
如图15-15所示为库卡控制编程器,其具有如下特点:
1)LCD彩显、VGA模式,640×480、256色;6D空间鼠标,外加键盘运动控制;示教过程简单。
2)三位开关、易于安全操作。
3)四种工作模式,可根据实际需要任意选择。

图15-15 库卡控制编程器

图15-16 库卡机器人标准工业控制PC
4.库卡机器人标准工业控制PC
如图15-16所示为库卡机器人标准工业控制PC。其特点为:①开放性好,能够直接和多种功能卡直接插接,方便扩展,通用性好;②程序可方便进行备份及恢复,而且可在短时间内完成,可直接外接显示器、鼠标和键盘,方便程序的读写,可随时进行系统的更新;③大容量硬盘,对程序指令基本无限制,并可长期存储相关操作和系统日志支持多种总线协议,与总线接口板连接方便,即插即用一旦出现系统错误,可在短时间内恢复可方便进行联网,易于监控和管理;④拆卸方便,易于维护。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。