



堆码机是将预定数量的包装件或产品,按一定的规则进行堆积的机器。集装堆码机包括以下几种托盘堆码机、托盘拆码机、无托盘堆码机、托盘机器人。
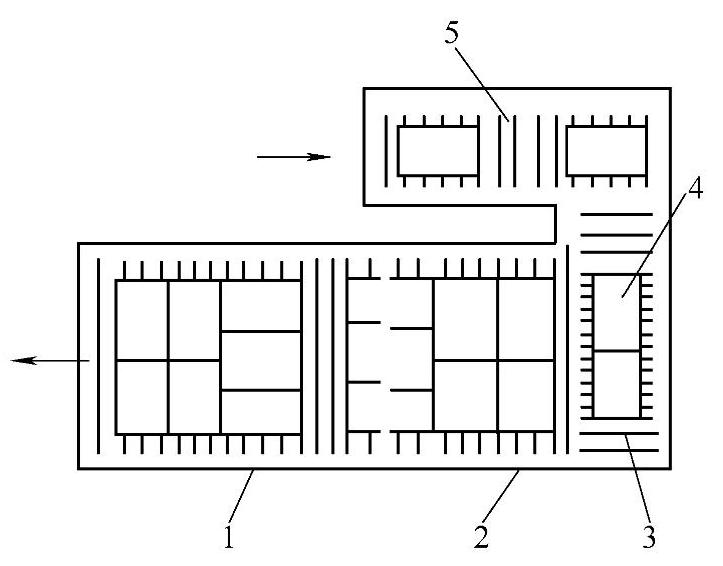
图15-5 单层堆码机原理图
1—输送辊 2—层输送机构 3—箱转向机构 4—物料 5—输送带
1.常用堆码机型式
1)单层堆码机。如图15-5所示,输送带5将物料输送过来,在箱转向机构3处按堆码时所需方向调整后进入层输机构2上,在层输机构上将物料紧密排列,且按照堆码时层排列顺序排列,然后由输送辊1送入下一个工位。
2)多层堆码机。多层堆码装置如图15-6所示,托送板1在输送带2下面,并且可以左右移动。工作时,物料排列在托送板上,此时托送板在左极限位置。当输送带2输送的物料3被挡板5挡住时,正好排列成一行。然后托送板右移,挡销4挡住欲随之右移的物料,随着托送板的右移,物料顺次落到升降台6上。每增加一层,升降台便下降一成物料的高度。
3)排列堆码机。如图15-7所示,成排物料由输送带1送来后,推板2将物料送到集料台7上后停止动作。此时推板8向左移动,先推A层、B层再推C层物料,最后将三层物料堆码在一起,由输送带5送到下一工位。物料由推板2推送到集料台的过程中,应有斜面装置,保证物料能顺利到达集料台,或集料台本身有升降功能。集料台有三个平面,每相邻面高度差要略大于物料高度,以利堆码。

图15-6 多层堆码装置示意图
1—托送板 2—输送带 3—物料 4—挡销 5—挡板 6—升降台
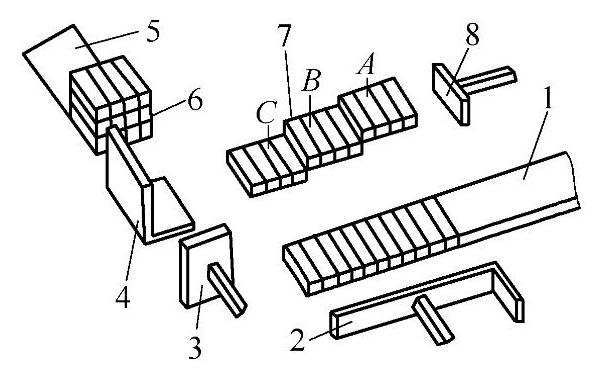
图15-7 排列堆码机结构示意图
1、5—输送带 2、3、8—推板 4—挡板 6—物料 7—集料台
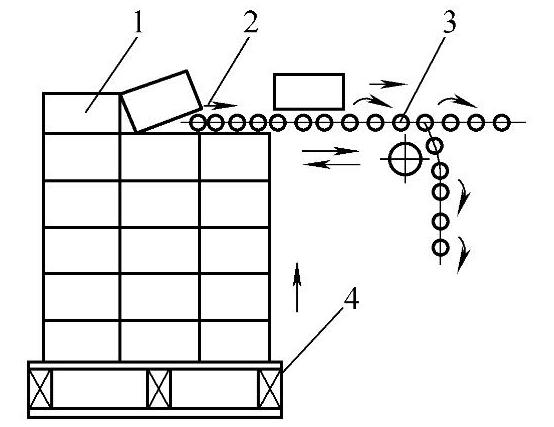
图15-8 拆码机工作原理图
1—箱 2—起箱辊 3—输送辊 4—托盘
4)拆码机。是将堆放好的物料自动拆卸的机器。其工作原理如图15-8所示,拆码机由装在框架上的许多辊子组成。辊子可以前后上下移动,最前边的辊子是起箱辊,它最先与箱子接触,并将上层的箱子抬起,然后辊子后退、下降,送走一层再一层,直至卸完为止。
2.托盘机器人(图15-9)
1)其主要机构由手部、腕和臂、升降机构、旋转机构、行走机构、驱动机构、控制系统等组成。
2)工作原理及工作范围。托盘机器人可以在托盘上堆码,亦可以将堆码在托盘上的货物拆卸下来。机器人依靠手部抓取货物,由安装在支柱上部的升降机构提升起来,随之支柱下部的转盘转动,将货物送到指定位置。
机器人沿垂面工作范围为b1、b2、b3、b4围起来的矩形部分。
3)手部结构。托盘机器人的手部是直接抓取货物的机构,抓取对象不同,方法不同,结构也不相同。一般手部结构主要有三种:①吸盘式。从货物的上部或两侧吸取。②夹取式。结构如图15-10所示,采用PLC控制完成抓取动作。③钩式。从物料的下部钩取。(https://www.xing528.com)
4)辅助设备。托盘机器人不能独立地完成堆码和拆码的工作,必须有其他的辅助机械配合。主要有分层输送机、输送机、转台等。
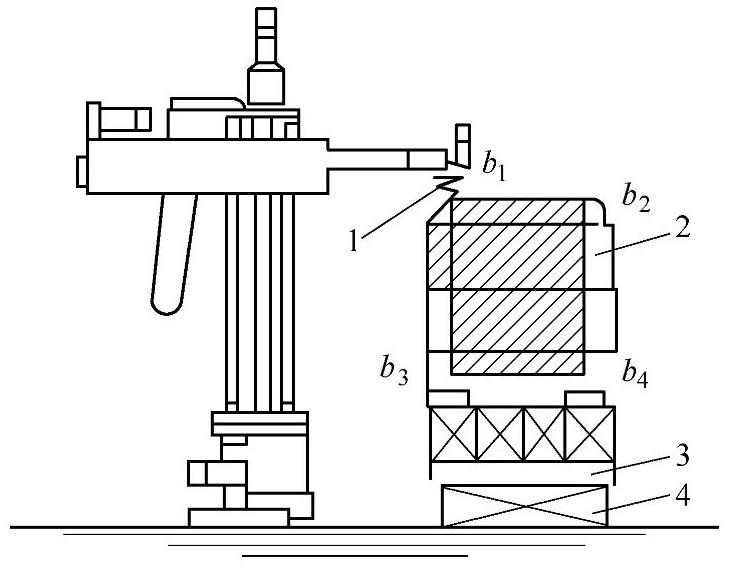
图15-9 托盘机器人
1—手部 2—货物 3—托盘 4—输送带
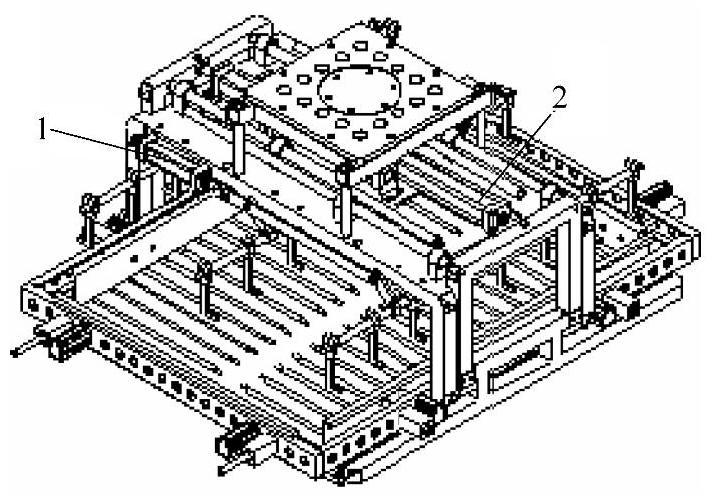
图15-10 钳爪式手部立体筒
1、2—气缸
3.低位托盘堆码机
低位托盘堆码机也称为固定托盘堆码机,其工作原理图如图15-11所示。
1)主要机构。由输送机构、提升机构、排列机构、支架、驱动机构、控制系统等组成。
2)工作原理。低位托盘堆码机在地面工作,空托盘底部可以与地面平齐,各层堆码都是在较低位置进行的。将已封好的纸箱按预定的方式排列、输送,每排好一列就由推板2向右推移,直到排好一层,即装满载货板8,此时提升机构3将装满箱的载货板提升到托盘堆码的高度,然后载货板连同一层箱移至托盘上方,载货板又向左移,一层箱被挡板9挡住而落至托盘上。最后载货板回到原来的位置,准备下一次堆码。
4.码垛机
码垛机是指按照编组方式和层数,完成对料袋、胶块、箱体等各种产品的码垛,采用最优化的设计使得垛形紧密、整齐。如图15-12所示为全自动码垛机。
1)机构组成:由压平输送机、缓停输送机、转位输送机、托盘仓、托盘输送机、编组机、推袋装置、码垛装置、垛盘输送机组成。
2)工作原理为:平板上工件符合栈板要求的一层工件,平板及工件向前移动直至栈板垂直面。上方挡料杆下降,另三方定位挡杆起动夹紧,此时平板复位。各工件下降到栈板平面,栈板平面与平板底面相距10mm,栈板下降一个工件高度。往复上述动作,直到栈板堆码达到设定要求。
3)主要特点:其结构设计优化,动作平稳可靠;码垛过程完全自动,正常运转时无须人工干预,具有广泛的适用范围;降低劳动强度,提高生产效率;提高单位面积的空间利用率,堆叠可以使货物向高层发展,节约空间;设有安全监控系统,有自动停机保护功能。
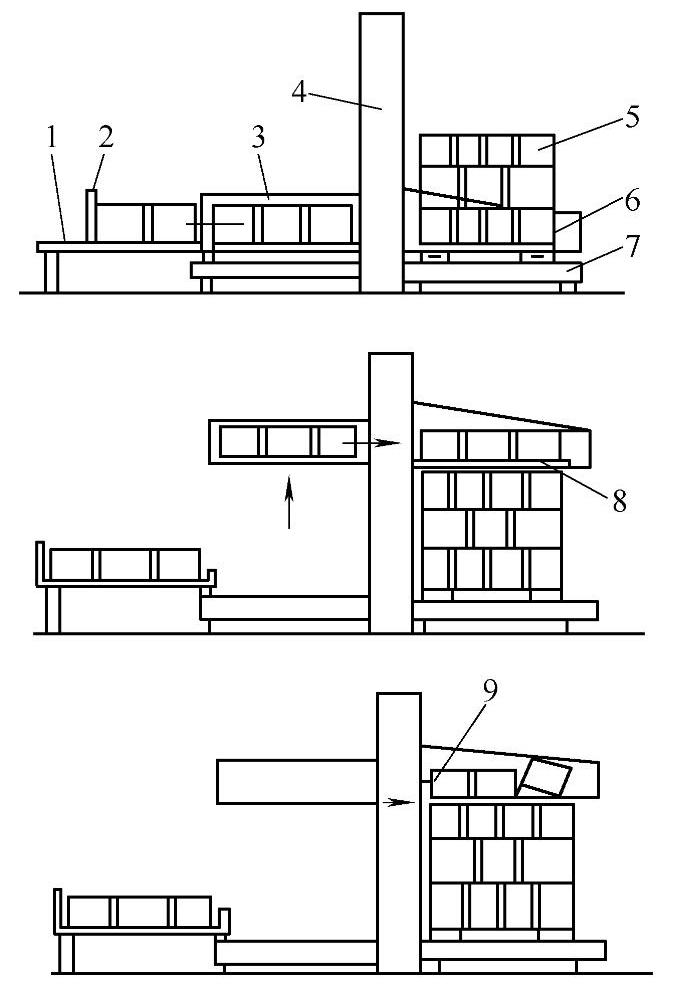
图15-11 低位托盘码垛机工作原理图
1—集料平台 2—推板 3—提升机构 4—支架 5—箱 6—滑轨挡板 7—托盘 8—载货板 9—挡销
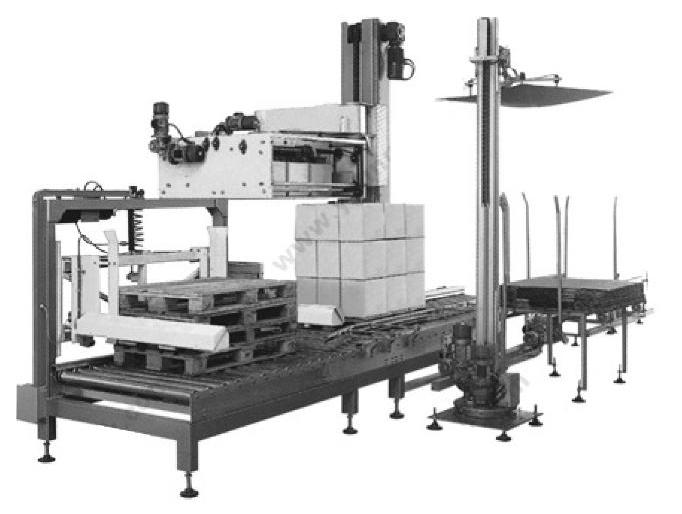
图15-12 全自动码垛机图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。